


Scientific journal
Modern problems of science and education
ISSN 2070-7428
"Перечень" ВАК
ИФ РИНЦ = 0,936
BATTERY ENERGY DEVELOPMENT GRAPPLE JAWS GAPING AT OVERLOAD FROZEN PYRITE FLOTATION

Введение
Использование потенциальной энергии поднятого при транспортировании грейфером к точке выгрузки груза является важнейшим резервом ресурсосбережения при грейферной перегрузке навалочных материалов. Использование данной энергии для восполнения хотя бы части энергозатрат на зачерпывание груза имеет большое практическое значение [6; 7].
Цель исследования – анализ изменения составляющих сил сопротивления зачерпыванию смерзшихся сыпучих материалов с последующей разработкой инженерной методики расчета кинематических, технологических и энергетических параметров грейфера.
Эксергетическим потенциалом располагают все элементы грейфера, и основная часть этого потенциала полезно используется на силовое внедрение режущих кромок челюстей (или режущих элементов челюстей) в смерзшийся материал при опускании раскрытого грейфера на груз. Не находит практического использования и теряется энергия опускания челюстей и нижней траверсы в момент раскрытия челюстей.
К моменту завершения зачерпывания груза грейфером, а следовательно, и завершения полного смыкания челюстей усилие в замыкающем канате растет, достигая максимума в момент выхода грейфера из зачерпываемого слоя и отрыва грейфера от штабеля материала.
При этом весь вес грейфера и зачерпнутого груза приходится на замыкающий канат, закрепленный на нижней траверсе, а удерживающий канат двухканатного грейфера находится практически в свободном состоянии вплоть до перемещения его к точке выгрузки (рис. 1, поз. 1).
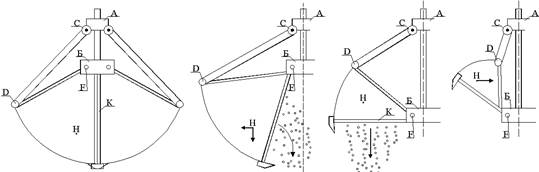
Рис. 1. Раскрытие челюстей грейфера при выгрузке материала
С момента прекращения натяжения замыкающего каната в точке выгрузки вес грейфера и груза переходит на удерживающий канат, закрепленный на верхней траверсе А.
При этом освобожденная нижняя траверса начинает опускаться, разматывая замыкающий канат. Челюсти, вращаясь в шарнирах D и F, раскрываются и высвобождают груз.
Центр тяжести челюстей и рычагов DC (точка Н) перемещается одновременно вниз и по горизонтали, удаляясь от точки смыкания челюстей (одновременно это и центр тяжести грейфера с грузом).
Высыпающийся груз, взаимодействуя с днищем челюсти, практически мгновенно раскрывает челюсти на максимально достигаемую величину раскрытия (поз. 3). Величина максимального раскрытия определяется равновесием моментов силы тяжести М, нижней траверсы Б (рис. 2, поз.1) и момента сил тяжести челюсти М2 относительно точки подвеса грейфера к удерживающему канату на верхней траверсе А.
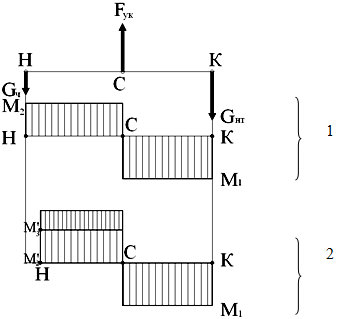
Рис. 2. Эпюры крутящих моментов сил тяжести нижней траверсы (Gнт) и челюсти (Gч) для серийного грейфера (1) и грейфера с пружинным аккумулятором энергии
Полному раскрытию челюстей (до положения поз. 4, рис. 1) препятствует возникновение усилия в точке центра тяжести челюсти, направляемого к точке смыкания челюстей К.
Анализ технических решений, направленных на использование эксергии поднятого груза и нижней траверсы, позволяет разделить их на следующие две группы:
- использование части энергии вращения шарнира челюсти при выгрузке и опускании нижней траверсы на закручивание торсионного вала оси шарниров или пружинных аккумуляторов энергии [1; 3];
- использование части энергии вращения шарнира челюсти или блока полиспаста нижней траверсы на вращение эксцентриков вибратора [3; 4] или маховика гироскопического аккумулятора энергии [5].
Как видно из рисунка 2 (поз. 2), в первом варианте использования энергии соблюдается равенство крутящих моментов сил
M1 = M’2 + M3 , (1)
где М3 – крутящий момент сил закручивания торсионного вала или пружинного аккумулятора,
М'2 – крутящий момент сил тяжести челюсти.
В данном случае М'2 < М2 из-за меньшего удаления центров тяжести челюстей от точки их смыкания (К). Следовательно, по варианту 1 достигается меньший угол раскрытия челюстей. В результате при силовом внедрении грейфера в смерзшуюся корку перегружаемого материала достигается перераспределение усилий (рис. 3).
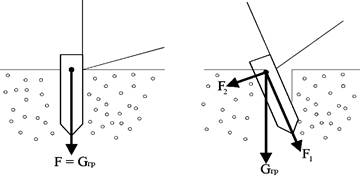
Рис. 3. Распределение сил при силовом внедрении режущих элементов раскрытого (1) и частично нераскрытого (2) грейфера в смерзшуюся корку сыпучего материала
Даже при незначительном недораскрытии челюстей усилие внедрения режущих клыков (F1) становится меньше, а следовательно, эффективность внедрения и степень зачерпывания снижаются.
По второму варианту использования энергии эффективность силового внедрения остается на более высоком уровне, чем по варианту 1.
По второму варианту энергию раскрученного гироскопа предлагается использовать для вращения эксцентрика вибраторов, установленных на челюстях.
Однако наличие жесткой кинематической связи шарниров челюстей с эксцентриком в решениях [2; 4] не позволяет использовать энергию, воспринятую эксцентриками вибратора шарниров челюстей, на повышение эффективности зачерпывания и снижение энергозатрат на зачерпывание материала. Здесь произвольное вращение эксцентриков вибратора заканчивается с прекращением вращения шарниров челюстей, а в период зачерпывания жестко кинематически соединенные эксцентрики воспринимают усилие вращения шарниров в противоположенном направлении, дополнительно увеличивая усилие в замыкающем канате.
Таким образом, наиболее эффективно использование энергии нижней траверсы при ее опускании в момент выгрузки грейфера достигается в решении [5]. Это обеспечивается размыканием кинематической связи маховика с шарниром челюсти после набора максимальных оборотов с помощью передачи винт-гайка и соединением вращающегося маховика с эксцентриком вибратора за счет импульса получаемого передачей винт-гайка при обратном ходе шарнира челюсти в момент начала зачерпывания материала. Это позволяет использовать эксергию выгрузки грейфера для снижения энергозатрат на зачерпывание груза.
Разработана конструкция аккумулятора энергии опускания нижней траверсы и челюстей при выгрузке материала. В отличие от известных попыток утилизации энергии разработанное решение не препятствует полному раскрытию челюстей и не налагает дополнительные усилия на замыкающий канат. Основу конструкции составляет маховик, приводимый во вращение при опускании траверсы. После завершения опускания вращающийся маховик размыкается от сектора, установленного на шарнире челюстей.
Для грейфера вместимостью 3,2 м3 и высотой челюсти до нижнего шарнира 1,7 м высота опускания нижней траверсы до положения полного раскрытия челюстей составляет 2150 мм. При раскрытии челюсти центр тяжести ее опускается на 850 мм и отодвигается от линии смыкания челюстей на 800 мм. Время выгрузки составляет ~ 0,25 с.
Число оборотов сектора шарнира при раскрытии челюстей соответствует:
![]()
где α – угол раскрытия одной челюсти, град;
τ – время раскрытия, с.
При опускании нижнего шарнира и челюстей их потенциальная энергия Э (Нм) меняется на величину:
![]()
где mт – масса траверсы, кг;
mч – масса челюстей, кг;
∆hт, ∆hч – величина опускания центра тяжести траверсы и челюстей соответственно, м.
Мощность Nм (кВт), воспринимаемая маховиком:
![]()
где ηм, ηз – к.п.д. передающей муфты и зубчатой пары соответственно;
τ – время выгрузки, с.
При использовании маховика для аккумуляции энергии вращения челюстей в момент разгрузки крутящий момент можно передать маховику зубчатой парой постоянного зацепления.
Мощность Nм (кВт), воспринимаемая двумя маховиками:
Nм=Мм∙ω, (5)
где Мм – момент инерции маховика, Нм;
ω – угловая скорость маховика, с-1:
![]()
где nм – конечное число оборотов маховика, зависящее от диаметра сектора на шарнире траверсы и диаметра шестерни на оси маховика, мин -1.
![]()
где mм – масса одного маховика, кг:
![]()
Для маховика типа цилиндра его диаметр D (м) определяется:

где ρ – плотность материала маховика, кг/м3;
h – высота цилиндра маховика, м.
Минимально необходимое число оборотов nmin (мин-1) эксцентрика вибратора:

где μт – коэффициент трения материала по стали;
β – угол передачи колебания, град.
Максимальное число оборотов nmax (мин-1) эксцентрика вибратора:
![]()
где r – эксцентриситет эксцентрика вибратора, м.
Передаточное число мультипликации
i=nв/nч= i1∙ i2, (12)
где i1 – передаточное число от сектора челюсти к маховику;
i2 – передаточное число от маховика к эксцентрику.
Частота колебаний wв (мин-1) эксцентрика вибратора:
wв=0,104 nw. (13)
где nw – число оборотов вибратора, мин-1.
Частота колебаний wч (мин-1) челюсти:

где Е – модуль упругости стали, кг/см2;
j – удельный момент инерции поперечного сечения челюсти на 1 м ширины, кг/см2;
В – ширина челюсти, м;
Gч – вес челюсти, кг.
Для случая wч/ wв<1, резонанс отсутствует.
Момент инерции Мэ (Нм) эксцентриков равен:
![]()
где Gг - масса груза, кг;
qэ - вес эксцентрика, кг;
Rэ – эксцентриситет, м.
Сила инерции колеблющейся массы груза, Н:
Fин= Gг/g. (16)
Мощность N (кВт), необходимая для преодоления момента инерции груза:

где Fтр – сила трения груза, обусловленная его весом, Н.
Средняя мощность Nср (кВт), передаваемая маховиком к эксцентрикам:
![]()
Амплитуда А (м) колебаний эксцентрика:
![]()
Использование разработанной конструкции маховика позволит утилизировать при зачерпывании груза ~ 56% эксергетического потенциала раскрытия челюстей при выгрузке грейфера.
Заключение. Анализом баланса крутящих моментов показано влияние пружинных аккумуляторов на степень раскрытия челюстей. Показано снижение усилия внедрения режущих элементов грейфера при силовом внедрении в смерзшийся слой материала. Показана необходимость узла размыкания кинематической связи в системе «аккумулятор энергии - шарнир траверсы челюсти грейфера».
Рецензенты:
Луконин Вадим Павлович, д.т.н., профессор, генеральный директор ФГУП «НИИ полимеров им. академика В.А. Каргина», г. Дзержинск.
Добротин Сергей Алексеевич, д.т.н., профессор, директор ООО «Научно-технический центр «Безопасность», г. Дзержинск.
Библиографическая ссылка
Суровегина Т.Ю., Никандров И.С., Шурашов А.Д. РАЗРАБОТКА АККУМУЛЯТОРА ЭНЕРГИИ РАСКРЫТИЯ ЧЕЛЮСТЕЙ ГРЕЙФЕРА ПРИ ПЕРЕГРУЗКЕ СМЕРЗШЕГОСЯ ФЛОТАЦИОННОГО КОЛЧЕДАНА // Современные проблемы науки и образования. 2013. № 2. ;URL: https://science-education.ru/en/article/view?id=8933 (дата обращения: 13.07.2026).