


Scientific journal
Modern problems of science and education
ISSN 2070-7428
"Перечень" ВАК
ИФ РИНЦ = 0,936
CONSTRUCTION OF THE MECHANICAL CHARACTERISTIC OF THE ASYNCHRONOUS ENGINE AND ITS APPROBATION

Введение
Асинхронный двигатель (АД) - электрический двигатель, нашедший очень широкое применение в различных отраслях промышленности и сельского хозяйства. АД с короткозамкнутым ротором обладает особенностями, обуславливающими его широкое распространение: простота в изготовлении, а это означает низкую начальную стоимость и высокую надежность; высокая эффективность вместе с низкими затратами на обслуживание приводят в итоге к низким общим эксплуатационным расходам; возможность работы непосредственно от сети переменного тока.
Режимы работы асинхронного электродвигателя
Двигатели с короткозамкнутым ротором - асинхронные машины, скорость которых зависит от частоты питающего напряжения, числа пар полюсов и нагрузки на валу. Как правило, при поддержании постоянного напряжения питания и частоты, если игнорируется изменение температуры, момент на валу будет зависеть от скольжения.
Вращающий момент АД можно определить по формуле Клосса:
![]() , (1)
, (1)
где ![]() ,
, ![]() - критический момент,
- критический момент, ![]() - критическое скольжение.
- критическое скольжение.
Кроме двигательного режима асинхронный двигатель имеет ещё три тормозных режима: а) генераторный тормозной с отдачей энергии в сеть; б) торможение противовключением; в) динамическое торможение.
При положительном скольжении машина с короткозамкнутым ротором будет действовать как двигатель, при отрицательном скольжении - как генератор. Из этого следует, что ток якоря двигателя с короткозамкнутым ротором будет зависеть только от скольжения. При выходе машины на синхронную скорость ток будет минимальным.
Генераторное торможение АД с отдачей энергии в сеть наступает при частоте вращения ротора, превышающей синхронную. В этом режиме электродвигатель отдаёт в сеть активную энергию, а из сети в электродвигатель поступает реактивная энергия, необходимая для создания электромагнитного поля.
Механическая характеристика для генераторного режима является продолжением характеристики двигательного режима во второй квадрант осей координат.
Торможение противовключением соответствует направлению вращения магнитного поля статора, противоположному вращению ротора. В этом режиме скольжение больше единицы, а частота вращения ротора по отношению к частоте вращения поля статора - отрицательна. Ток в роторе, а следовательно, и в статоре достигает большой величины. Для ограничения этого тока в цепь ротора вводят добавочное сопротивление.
Режим торможения противовключением наступает при изменении направления вращения магнитного поля статора, в то время как ротор электродвигателя и соединённые с ним механизмы продолжают вращение по инерции. Этот режим возможен также и в случае, когда поле статора не меняет направления вращения, а ротор под действием внешнего момента изменяет направление вращения.
В данной статье рассмотрим построение механической характеристики асинхронного двигателя в двигательном режиме.
Построение механической характеристики с помощью модели
Паспортные данные АД ДМТ f 011-6у1: Uф =220 - номинальное фазное напряжение, В; p=3 - число пар полюсов обмоток; n=880 - скорость вращения номинальная, об/мин; Pн=1400 - мощность номинальная, Вт; Iн=5,3 - ток ротора номинальный, А; η = 0.615 - к.п.д. номинальный, %; cosφ = 0.65 - cos(φ) номинальный; J=0.021 - момент инерции ротора, кг·м2; Ki = 5.25 - кратность пускового тока; Kп = 2.36 - кратность пускового момента; Kм = 2.68 - кратность критического момента.
Для исследования эксплуатационных режимов асинхронных двигателей используются рабочие и механические характеристики, которые определяются экспериментально или рассчитываются на основе схемы замещения (СЗ). Для применения СЗ (рис.1) необходимо знать её параметры:
- R1, R2', RM - активные сопротивления фаз статора, ротора и ветви намагничивания;
- X1, X2', XM - индуктивные сопротивления рассеяния фаз статора ротора и ветви намагничивания.
Эти параметры требуются для определения пусковых токов при выборе магнитных пускателей и контакторов, при выполнении защит от перегрузок, для регулирования и настройки системы управления электроприводом, для моделирования переходных процессов. Кроме того, они необходимы для расчета пускового режима АД, определения характеристик асинхронного генератора, а также при проектировании асинхронных машин с целью сопоставления исходных и проектных параметров [3].
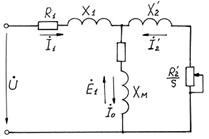
Рис. 1. Схема замещения асинхронного двигателя
Воспользуемся методикой расчёта параметров схемы замещения [3] для определения активных и реактивных сопротивлений фаз статора и ротора. Значения коэффициента полезного действия и коэффициента мощности при частичных нагрузках, необходимые для расчётов, приведены в техническом каталоге [4 стр.10]: pf = 0.5 - коэффициент частичной нагрузки, %; Ppf = Pн·pf - мощность при частичной нагрузке, Вт; η _pf = 0.56 - к.п.д. при частичной нагрузке, %; cosφ_pf = 0.4 - cos(φ) при частичной нагрузке.
Значения сопротивлений в схеме замещения: X1=4.58 - реактивное сопротивление статора, Ом; X2'=6.33 - реактивное сопротивление ротора, Ом; R1=3.32 - активное сопротивление статора, Ом; R2'=6.77 - активное сопротивление ротора, Ом.
Построим механическую характеристику асинхронного двигателя по формуле Клосса (1).
Скольжение определяют из выражения вида:
![]() , (2)
, (2)
где  - скорость вращения ротора АД, рад/сек,
- скорость вращения ротора АД, рад/сек,
синхронная скорость вращения:
 . (3)
. (3)
Критическая скорость вращения ротора:
![]() . (4)
. (4)
Критическое скольжение:
![]() . (5)
. (5)
Точку критического момента определим из выражения
![]() . (6)
. (6)
Пусковой момент определим по формуле Клосса при s=1:
![]() . (7)
. (7)
По произведенным расчетам построим механическую характеристику АД (рис. 4). Для ее проверки на практике проведем эксперимент.
Построение экспериментальной механической характеристики
При проведении эксперимента используется лабораторный стенд НТЦ-13.00.000 «Электропривод». Имеется система, состоящая из АД, к валу которого в качестве нагрузки подключен двигатель постоянного тока (ДПТ) независимого возбуждения. Необходимо построить механическую характеристику асинхронного двигателя, используя паспортные данные асинхронной и синхронной машин и показания датчиков. Имеем возможность изменять напряжение обмотки возбуждения ДПТ, измерять токи на якоре синхронного и асинхронного двигателя, частоту вращения вала. Подключим АД к источнику питания и будем нагружать его, изменяя ток обмотки возбуждения ДПТ. Проведя эксперимент, составим таблицу значений из показаний датчиков:
Таблица 1 Показания датчиков при нагрузке асинхронного двигателя
|
I в, (А) |
I я, (А) |
Ω, (рад/с) |
I 2, (А) |
|
0 |
0,3 |
98 |
1 |
|
0,05 |
1,4 |
95 |
1,1 |
|
0,1 |
2 |
93 |
1,2 |
|
0,15 |
2,6 |
92 |
1,4 |
|
0,2 |
3 |
90 |
1,5 |
|
0,35 |
4 |
87 |
2,4 |
|
0,6 |
4,5 |
86 |
3,7 |
|
0,8 |
4,6 |
81 |
4,2 |
где Iв - ток обмотки возбуждения двигателя постоянного тока, I я - ток якоря двигателя постоянного тока, Ω - скорость вращения ротора асинхронного двигателя, I 2 - ток ротора асинхронного двигателя.
Паспортные данные синхронной машины типа 2П H90L УХЛ4: Pн=0,55 - номинальная мощность, кВт; Uном=220 - номинальное напряжение, В; Uв.ном=220 - напряжение возбуждения номинальное, В; Iя.ном=3,32 - номинальный ток якоря, А; Iв.ном=400 - ток возбуждения номинальный, мА; Rя=16,4 - сопротивление якоря, Ом; nн=1500 - скорость вращения номинальная, об/мин; Jдв=0,005 - момент инерции, кг·м2; 2рп=4 - число пар полюсов; 2а=2 - число параллельных ветвей обмотки якоря; N=120 - число активных проводников обмотки якоря.
В ротор ДПТ ток поступает через одну щетку, протекает через все витки обмотки ротора и выходит через другую щетку. Точка контакта обмотки статора с обмоткой ротора - через коллекторную пластину или сегменты, на которые нажимает щетка в это время (щетка обычно более широка, чем один сегмент). Так как каждый отдельный виток обмотки ротора взаимосвязан с сегментом коллектора, ток фактически проходит через все витки и через все коллекторные пластины на его пути через ротор.

Рис. 2. Токи, протекающие в роторе двигателя постоянного тока с двумя полюсами
На рисунке 2 видно, что все проводники, лежащие у полюса N, имеют положительный заряд, в то время как все проводники под полюсом S несут отрицательный заряд. Поэтому все проводники под полюсом N получат нисходящую силу (которая пропорциональна радиальной плотности потока В и току ротора), в то время как все проводники под полюсом S получат равную восходящую силу. В результате на роторе создается вращающий момент, величина которого пропорциональна произведению плотности магнитного потока и тока. На практике плотность магнитного потока не будет абсолютно однородна под полюсом, таким образом, сила на некоторых проводниках ротора будет больше, чем на других. Полный момент, развивающийся на валу, будет равен:
М = КТФI, (8)
где Ф - полный магнитный поток, коэффициент KT является постоянным для данного двигателя [5].
В соответствии с формулой (8) регулирование (ограничение) момента может быть достигнуто за счет изменения тока I или магнитного потока Ф. На практике регулирование момента чаще всего осуществляется за счет регулирования тока. Регулирование тока двигателя производится его системой управления (или оператором) за счет изменения подводимого к двигателю напряжения с помощью преобразователей электроэнергии или включением в его цепи добавочных резисторов [2].
Рассчитаем конструктивную постоянную двигателя, входящую в уравнение (8):
![]() . (9)
. (9)
Установим связь между потоком двигателя и током обмотки возбуждения. Как известно из теории электрических машин, из-за влияния насыщения магнитной системы эта связь нелинейная и имеет вид, показанный на рисунке 3. С целью лучшего использования железа машина проектируется так, чтобы в номинальном режиме рабочая точка находилась на перегибе кривой намагничивания. Примем величину магнитного потока пропорциональной току возбуждения [1].
Фпр.=Iв, (10)
где Iв - ток возбуждения.

Ф - реальное значение потока; Ф пр. - значение потока, принятое для расчётов
Рис. 3. Соотношение значений магнитного потока, принятого и реального
Так как у АД и ДПТ в проведенном эксперименте один общий вал, можем рассчитать момент, создаваемый ДПТ, и на основе полученных значений и показаний датчика скорости построить экспериментальную механическую характеристику АД (рисунок 4).
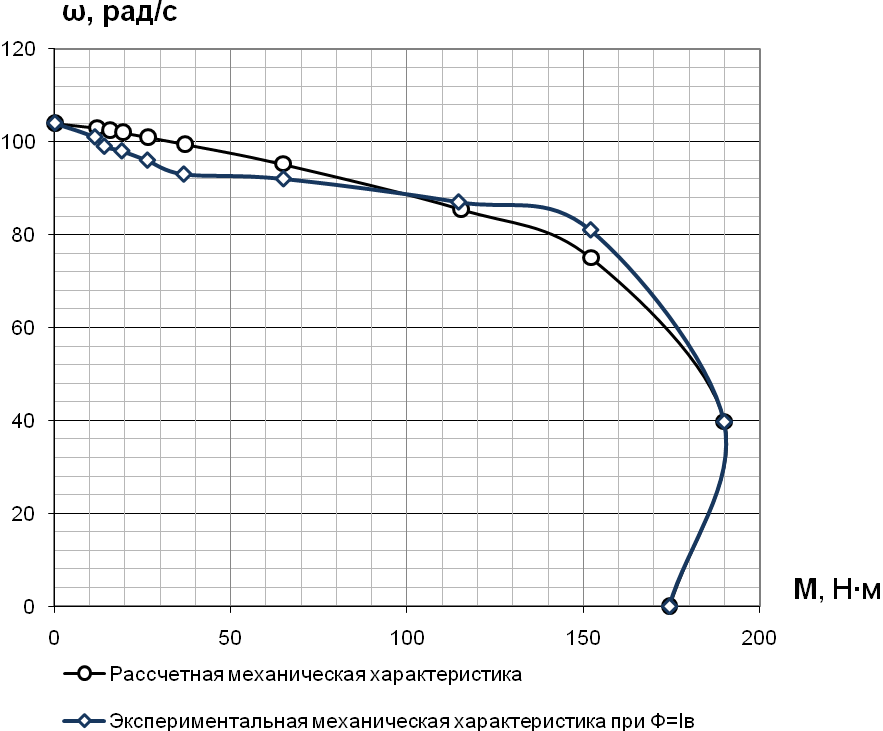
Рис.4. Механические характеристики асинхронного двигателя: расчетная и экспериментальная
Полученная экспериментальная характеристика в области низких значений момента расположена ниже характеристики, рассчитанной теоретически, и выше - в области высоких значений. Такое отклонение связано с разностью принятого для расчетов и реального значений магнитного потока (рис. 3). Оба графика пересекаются при Фпр.=Iв. ном.
Введем поправку в расчеты, установив нелинейную зависимость (рис. 5):
Ф=а·Iв, (11)
где а - коэффициент нелинейности.
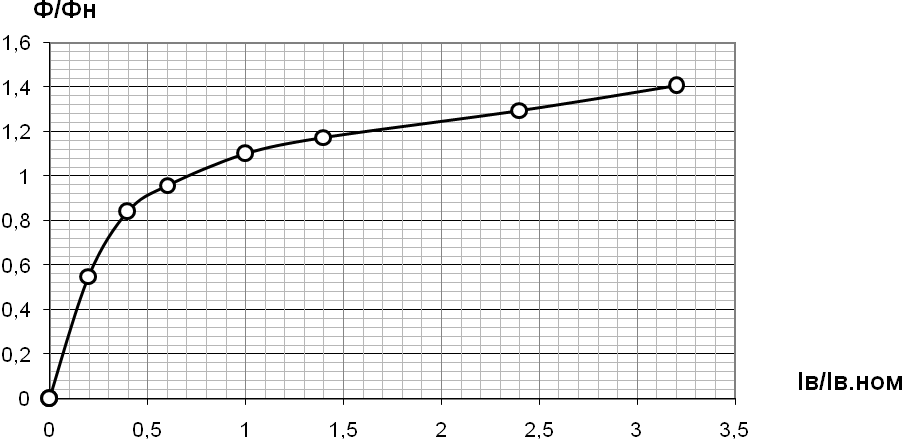
Рис. 5. Отношение магнитного потока к току возбуждения
Полученная экспериментальная характеристика примет вид, показанный на рис. 6.

Рис.6. Механические характеристики асинхронного двигателя: расчетная и экспериментальная
Рассчитаем погрешность полученных экспериментально данных для случая, в котором магнитный поток линейно зависит от тока возбуждения (10), и случая, в котором эта зависимость нелинейная (11). В первом случае суммарная погрешность составляет 3,81 %, во втором 1,62 %.
Вывод
Механическая характеристика ![]() , построенная по экспериментальным данным, отличается от характеристики, построенной с использованием формулы Клосса (1) за счет принятого допущения Фпр.=Iв, расхождение составляет 3,81 %, при Iв=Iв.ном.=0,4 (А) данные характеристики совпадают. При достижении Iв номинального значения наступает насыщение магнитной системы ДПТ, в результате дальнейшее повышение тока возбуждения все меньше сказывается на значении магнитного потока. Поэтому для получения более точных значений момента необходимо вводить коэффициент насыщения, что позволяет повысить точность расчета в 2,3 раза. Механическая характеристика, построенная модельным путем, адекватно отражает работу реального двигателя, её можно брать за основу в дальнейших исследованиях.
, построенная по экспериментальным данным, отличается от характеристики, построенной с использованием формулы Клосса (1) за счет принятого допущения Фпр.=Iв, расхождение составляет 3,81 %, при Iв=Iв.ном.=0,4 (А) данные характеристики совпадают. При достижении Iв номинального значения наступает насыщение магнитной системы ДПТ, в результате дальнейшее повышение тока возбуждения все меньше сказывается на значении магнитного потока. Поэтому для получения более точных значений момента необходимо вводить коэффициент насыщения, что позволяет повысить точность расчета в 2,3 раза. Механическая характеристика, построенная модельным путем, адекватно отражает работу реального двигателя, её можно брать за основу в дальнейших исследованиях.
Рецензенты:
- Пюкке Георгий Александрович, д.т.н., профессор кафедры систем управления КамчатГТУ, г. Петропавловск-Камчатский.
- Потапов Вадим Вадимович, д.т.н., профессор филиала ДВФУ, г. Петропавловск-Камчатский.
Библиографическая ссылка
Лиходедов А.Д. ПОСТРОЕНИЕ МЕХАНИЧЕСКОЙ ХАРАКТЕРИСТИКИ АСИНХРОННОГО ДВИГАТЕЛЯ И ЕЁ АПРОБАЦИЯ // Современные проблемы науки и образования. 2012. № 5. ;URL: https://science-education.ru/en/article/view?id=6988 (дата обращения: 15.07.2026).