


Scientific journal
Modern problems of science and education
ISSN 2070-7428
"Перечень" ВАК
ИФ РИНЦ = 0,936
THE DEVELOPMENT OF CONTINUOUS PRECISION HIGH-SPEED ELECTROMECHANICAL DRIVE MODEL

Следящий привод отсечного золотника (СПОЗ) является типовым элементом блока регулирования современной системы автоматического регулирования паровой турбины (САР ПТ). Он предназначен для преобразования электрического сигнала управления от электронной управляющей части (ЭУЧ) САР ПТ в перемещение сервомотора (СМ), перемещающего соответствующий паровпускной регулирующий клапан (РК). Конкретный пример такого объекта и системы регулирования приведен в работе [3].
Целью исследования является разработка новой модели высокоточного быстродействующего следящего электромеханического привода.
Материал и методы исследования. Золотник отсечной (ОЗ), являясь элементом гидравлики, предназначен для изменения положения сервомоторов (гидроцилиндров) привода РК по сигналам управления от ЭУЧ системы регулирования посредством ЭМП, а также для форсированного перемещения СМ в сторону закрытия РК при срабатывании аварийной защиты ПТ. Не рассматривая здесь вопросы выбора оптимальной структуры системы регулирования, частично отражённые ранее в [4], уделим более пристальное внимание электромеханическому варианту исполнения СПОЗ, обладающему рядом эксплуатационных достоинств по сравнению с аналогами [1].
Такой СПОЗ функционально включает в себя исполнительный элемент – синхронный электродвигатель переменного тока (СЭ ПТ); ролико-винтовую передачу (РВП); преобразователь частоты (ПЧ), реализующий алгоритм широтно-импульсной модуляции (ШИМ)/векторного управления СЭ ПТ; датчик положения ОЗ (обратная связь).
Рассмотрим приближённую математическую модель электромеханического преобразователя ОЗ. Функциональная схема следящего привода ОЗ представлена на рис. 1.
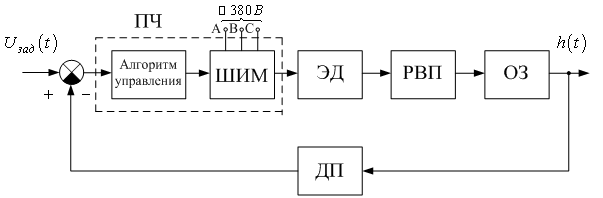
Рис. 1. Функциональная схема следящего привода отсечного золотника со следующими условными
обозначениями: ШИМ – модуль реализующий алгоритм широтно-импульсной модуляции; ЭД ПТ – электрический двигатель переменного тока; РВП – ролико-винтовая передача; ОЗ – отсечной золотник; ДП – датчик положения ОЗ; ПЧ – преобразователь частоты
Составим математическую модель СПОЗ согласно функциональной схеме. При построении математической модели синхронного двигателя с постоянными магнитами приняты следующие допущения:
- отсутствует насыщение магнитной цепи, потери в стали, эффект вытеснения тока;
- обмотки статора симметричны;
- индуктивность рассеяния не зависит от положения ротора в пространстве.
Уравнения синхронной машины с постоянными магнитами также рассмотрим в ортогональной синхронной системе координат ![]() , ось
, ось ![]() которой ориентирована по магнитной оси ротора (рис. 2).
которой ориентирована по магнитной оси ротора (рис. 2).
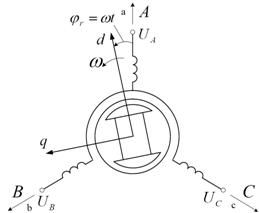
Рис. 2. Схематическое изображение синхронного двигателя с постоянными магнитами
В этом случае уравнения принимают следующий вид (модель Парка – Горева) [5]:
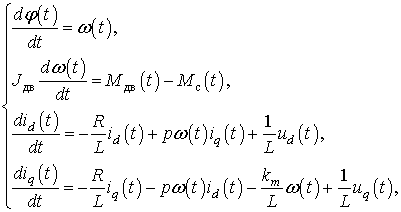
где ![]() токи и напряжения статора по осям
токи и напряжения статора по осям ![]() и
и ![]() ; электромагнитный момент на валу ЭД ПТ;
; электромагнитный момент на валу ЭД ПТ; ![]() электромагнитный момент на валу ЭД ПТ;
электромагнитный момент на валу ЭД ПТ; ![]() статический момент нагрузки;
статический момент нагрузки; ![]() угловая частота вращения ротора, рад/c;
угловая частота вращения ротора, рад/c; ![]() момент инерции электропривода, приведенный к валу двигателя;
момент инерции электропривода, приведенный к валу двигателя; ![]() и
и ![]() сопротивление и индуктивность статорных обмоток (для случая неявнополюсной конструкции ротора двигателя).
сопротивление и индуктивность статорных обмоток (для случая неявнополюсной конструкции ротора двигателя).
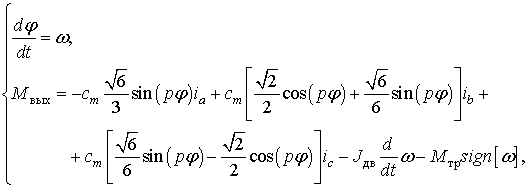
Рассмотрим более подробно второе уравнение системы , уравнение движения привода
 ,
,
где ![]() коэффициент момента электродвигателя. Для преобразования вращения ротора электродвигателя в поступательное перемещение отсечного золотника применена РВП. Для получения более полной модели СПОЗ необходимо модель дополнить математической моделью РВП. Уравнение движения привода с учетом РВП:
коэффициент момента электродвигателя. Для преобразования вращения ротора электродвигателя в поступательное перемещение отсечного золотника применена РВП. Для получения более полной модели СПОЗ необходимо модель дополнить математической моделью РВП. Уравнение движения привода с учетом РВП:
![]()
![]() угловое ускорение электродвигателя;
угловое ускорение электродвигателя; ![]() суммарный момент трения в двигателе и подшипниках ЭМП;
суммарный момент трения в двигателе и подшипниках ЭМП; ![]() момент на валу ЭД ПТ.
момент на валу ЭД ПТ.
Сила, приложенная со стороны электродвигателя, к отсечному золотнику [3]:
![]() ,
,
![]() величина шага РВП;
величина шага РВП; ![]() коэффициент полезного действия РВП.
коэффициент полезного действия РВП.
Величина скорости перемещения отсечного золотника определяется из выражения [3]:
 ,
,
![]() суммарная масса отсечного золотника и винта, жестко с ним соединенного;
суммарная масса отсечного золотника и винта, жестко с ним соединенного; ![]() коэффициент вязкого трения в отсечном золотнике;
коэффициент вязкого трения в отсечном золотнике; ![]() ускорение отсечного золотника;
ускорение отсечного золотника; ![]() скорость отсечного золотника.
скорость отсечного золотника.
На вход системы электромеханического следящего привода поступает сигнал ![]() , пропорциональный задаваемому значению отклонения отсечного золотника. Управление происходит непрерывным токовым сигналом в диапазоне
, пропорциональный задаваемому значению отклонения отсечного золотника. Управление происходит непрерывным токовым сигналом в диапазоне ![]() и входное сопротивление, установленное на входе АЦП преобразователя частоты, имеет значение
и входное сопротивление, установленное на входе АЦП преобразователя частоты, имеет значение ![]() , что эквивалентно изменению сигнала
, что эквивалентно изменению сигнала ![]() в диапазоне
в диапазоне ![]() .
.
Ошибка отработки сигнала
![]()
где ![]() сигнал с выхода датчика линейного перемещения золотника []:
сигнал с выхода датчика линейного перемещения золотника []:
![]() ,
,
![]() коэффициент датчика перемещения отсечного золотника.
коэффициент датчика перемещения отсечного золотника.
Зависимость угловой скорости вала ЭД ПТ от величины перемещения вала РВП, определяется выражением:
![]() .
.
Тогда математическая модель СПОЗ в системе координат ![]() примет вид:
примет вид:
где
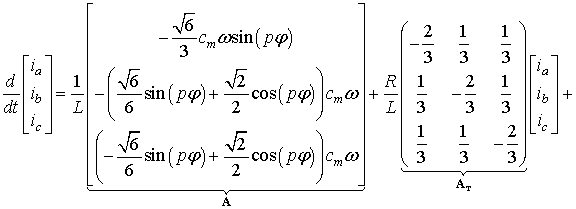
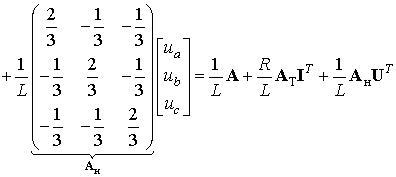 ,
,
где ![]() и
и ![]() матрицы разложения, справедливы для трехфазных симметричных машин переменного тока (используются в ШИМ);
матрицы разложения, справедливы для трехфазных симметричных машин переменного тока (используются в ШИМ); ![]()
![]() .
.
Для управления СПОЗ, последний комплектуется преобразователем частоты (ПЧ) [7], модель и алгоритм работы которого подлежат отдельному рассмотрению.
Результаты исследования. Таким образом, результирующее управление, поступающее на ПЧ ЭД ПТ имеет вид:
![]() ,
,
где ![]() сигнал, обеспечивающий уменьшение ошибки от воздействия осевой нагрузки на отсечной золотник,
сигнал, обеспечивающий уменьшение ошибки от воздействия осевой нагрузки на отсечной золотник, ![]() при
при ![]() ;
; ![]() при
при ![]() ;
; ![]() сигнал, пропорциональный значению отклонения отсечного золотника, до которого значение
сигнал, пропорциональный значению отклонения отсечного золотника, до которого значение ![]() равно нулю (
равно нулю (![]() гидравлический ноль);
гидравлический ноль); ![]() коэффициент компенсационного сигнала.
коэффициент компенсационного сигнала.
Структурная схема электромеханического СПОЗ представлена на рис. 3.
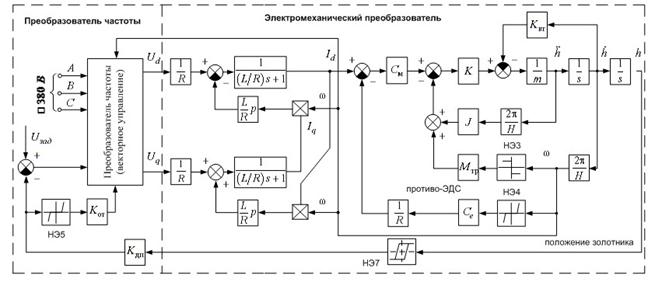
Рис. 3. Структурная схема следящего привода отсечного золотника
Выводы. Видно, что обе математические модели и являются нелинейными, но математическая модель СПОЗ в системе координат ![]() значительно проще. Поэтому синтез управления для СПОЗ можно проводить в этой системе, а моделирование, ШИМ–регулирование напряжения на обмотках статора в системе
значительно проще. Поэтому синтез управления для СПОЗ можно проводить в этой системе, а моделирование, ШИМ–регулирование напряжения на обмотках статора в системе ![]() .
.
Техническая документация и результаты предварительных испытаний [2] одного из существующих образцов СПОЗ (производства ЗАО «Диаконт», г. С.-Петербург) позволили выполнить количественную оценку параметров его математической модели [6], основными из которых являются параметры электродвигателя (Таблица 1). Нелинейные характеристики реального оборудования, входящего в такой контур регулирования [8], могут быть описаны типовыми элементами из Таблицы 2. Следующим этапом исследования предполагается верификация разработанной модели СПОЗ путём сравнения переходных процессов по перемещению штока в модели и реальном опытном образце, а также исследование влияния зоны нечувствительности в связке «ОЗ-СМ» на устойчивость гидравлического контура в сравнении с имеющимися эксплуатационными данными [9].
Таблица 1
Параметры электродвигателя
|
Коэффициент момента электродвигателя |
|
|
Шаг РВП |
|
|
Коэффициент полезного действия РВП |
|
|
Суммарный момент инерции, приведенный к ротору серводвигателя |
|
|
Суммарный момент трения в приведенный к валу двигателя |
|
|
Суммарная масса отсечного золотника и винта |
|
|
Коэффициент датчика перемещения ОЗ |
|
|
Коэффициент вязкого трения в отсечном золотнике |
|
|
Механическая постоянная времени серводвигателя, мс |
1,96 |
|
Электрическая постоянная времени серводвигателя, мс |
7,36 |
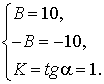
Таблица 2
Типовые элементы нелинейных характеристик оборудования контура регулирования
|
Нелинейный элемент (аналитическая форма записи) |
Обозначение на структурной схеме (рис. 3) |
Значение параметров |
|
|
Нелинейный элемент 1 |
|
|
|
|
Нелинейный элемент 2 |
Тоже самое (см. НЭ1) |
|
|
|
Нелинейный элемент 4 |
|
|
|
|
Нелинейный элемент 5 |
Тоже самое (см. НЭ4) |
|
Примечание: смещение в положительном направлении оси абсцисс. |






Рецензенты:
Панаиотти С.С., д.т.н., профессор, преподаватель КФ МГТУ им. Н.Э. Баумана, г. Калуга;
Шаталов В.К., д.т.н., профессор, зав. кафедрой К5 – КФ МГТУ им. Н.Э. Баумана «Технологии обработки материалов», г. Калуга.
Библиографическая ссылка
Сизов А.Н., Чубаров Ф.Л., Гусев И.В. РАЗРАБОТКА МОДЕЛИ ВЫСОКОТОЧНОГО БЫСТРОДЕЙСТВУЮЩЕГО СЛЕДЯЩЕГО ЭЛЕКТРОМЕХАНИЧЕСКОГО ПРИВОДА // Современные проблемы науки и образования. 2015. № 1-1. ;URL: https://science-education.ru/en/article/view?id=19719 (дата обращения: 26.07.2026).