



В реальных производственных условиях водитель лесовозного автопоезда при движении по разным категориям лесовозных дорог самостоятельно определяет в зависимости от условий режим движения своей машины: момент переключения передач и торможения, начало замедления и ускорения и т.д. Для решения различных инженерных задач [2–6] необходимо адекватно учитывать действия водителя лесовозного автотранспорта и соответственно режим движения лесовозного автопоезда при неустановившемся движении. Традиционные способы расчетов, основанные на методе равновесных скоростей, не позволяют в должной мере учитывать многие факторы, влияющие на движение лесовозного автопоезда в постоянно меняющихся условиях движения (подъемы, спуски, наличие ограничений скорости и т.д.). При этом, как было доказано ранее [1, 7, 8, 9], значения параметров движения, полученные на основе этих зависимостей, отличаются от фактических в среднем в 1,4 раза, а на отдельных участках — в 2 раза.
Коллективом авторов [1, 7, 8, 9] на протяжении значительного периода времени проводились исследования, посвященные разработке методики и алгоритма расчетов и получению зависимостей, которые адекватно описывают режимы движения лесовозного автопоезда при неустановившемся движении. Выведенные зависимости позволяют с достаточной точностью получить необходимые значения параметров движения лесотранспорта, которые отличаются от фактических не более чем на 6% [9].
В работах [7, 8] выведены зависимости для определения скорости движения лесовозного автопоезда в конце участка длиной S с учетом начальной скорости – υ0 и пройденного расстояния при изменении скорости от υ0 до υк, в режиме движения накатом, с полным и частичным использованием мощности двигателя, при торможении двигателем, моторным и колесными тормозами.
Однако при определении показателей движения вручную, а также при моделировании движения на ПЭВМ затруднено определение момента перехода от одного режима движения к другому, например:
1) переход от режима разгона автопоезда к режиму снижения скорости с тем, чтобы не допустить превышения скорости на участке, имеющем ее ограничение, и обеспечить прохождение этого участка с максимально допустимой скоростью при выполнении условий безопасности движения;
2) определение скорости движения, при которой наиболее целесообразно начинать переключение передач, особенно с n-ой на (n-1) передачу.
При моделировании движения лесовозного автопоезда через короткие интервалы пути приходится проводить большое количество итеративных вычислений [9]. Для уменьшения объемов расчетов при подходе к участкам, имеющим ограничения скорости, на ПЭВМ и особенно при производстве их вручную предлагается определять необходимые показатели путем решения двух уравнений, одним из которых описывается движение при разгоне и определяется оптимальная величина скорости движения в точке начала торможения, а вторым — процесс изменения скорости движения при торможении.
Скорость движения на вертикальных кривых при разгоне и торможении определяется по формуле [7]:
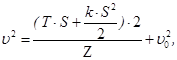 (1)
(1)
здесь ![]() ;
;  ;
; ![]() ;
; ![]() ;
; ![]() ,
,
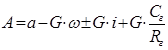
где G – вес автопоезда, Н; Rг – радиус горизонтальной кривой, м; Сг – коэффициент, учитывающий увеличение сопротивления движению на горизонтальных кривых; а и b – коэффициенты зависимости, аппроксимирующей тяговую или тормозную характеристику автопоезда в виде F = a–b•υ2; ω – коэффициент сопротивления качению; δ – коэффициент учета инерции вращающихся масс; kв – коэффициент сопротивления воздушной среды автомобиля; Δ – коэффициент, учитывающий дополнительное сопротивление от прицепов; Ω – лобовая площадь автомобиля, м2; R – радиус вертикальной кривой, м; i – продольный уклон; g – ускорение свободного падения, м/с2; υ – скорость движения автопоезда, м/с; S – расстояние от начала участка до точки, в которой определяется скорость движения, м.
Исходя из зависимости (1) скорость движения в точке начала торможения – ![]() нт на участке длиной l:
нт на участке длиной l:
![]() (2)
(2)
или
![]() (3)
(3)
где l – длина участка, м; ![]() – расстояние, на котором производится торможение автопоезда, м.
– расстояние, на котором производится торможение автопоезда, м.
Принимая в начале участка торможения ![]() за начальную скорость, получим:
за начальную скорость, получим:
![]() (4)
(4)
![]() (5)
(5)
R и k принимаются со знаком «+» на вертикальной выпуклой кривой, со знаком «–» на вогнутой кривой.
Величина T// — тормозное усилие в точке начала торможения
T//=T/+kl-kST
Следовательно,
![]() (6)
(6)
Просуммировав уравнения (3) и (6), получим:

![]() (7)
(7)
Исходя из зависимости (4) получаем:

![]() (8)
(8)
На прямолинейном в профиле участке решение упрощается, при ![]() получаем:
получаем:
![]() (9)
(9)
Проведенный анализ показал, что ранее разработанная методика [1] для решения поставленной инженерной задачи с использованием более сложных зависимостей пригодна для решения данной задачи при проведении массовых расчетов на ПЭВМ, но их освоение и использование в учебном процессе при расчетах вручную затруднительно. В то же время расхождения при расчетах с использованием обоих методов по максимальной допустимой скорости при разгоне и расстоянию до точки начала торможения превышают 0,5 %, а значения ограничений скорости движения совпадают практически полностью. Следовательно, новый, более рациональный метод расчетов вполне применим для практических целей.
Как известно, на практике при переключении передач скорость движения автопоезда изменяется. Кроме этого, водитель затрачивает определенное время на саму процедуру переключения, чем зачастую пренебрегают при расчетах, считая, что переключение передач происходит мгновенно, что приводит к значительным погрешностям и неточностям. При переходе с низшей передачи для получения наибольшей интенсивности разгона необходимо переключение передачи с максимальной скорости на высшую передачу. При переходе с высшей передачи на низшую необходимо стремиться к переключению, при котором движение на низшей передаче начнется с максимально допустимой скорости.
Для определения скорости движения υ, с которой следует переходить к движению на (n-1) передаче, используется зависимость, полученная в результате решения уравнения:
![]() (10)
(10)
![]() (11)
(11)
где t – время переключения передач, с.
Решая это уравнение относительно υ0, получим:
![]() (12)
(12)
На прямолинейных в профиле участках R=∞, тогда уравнение для определения скорости движения υ0, при достижении которой следует начинать переключение на (n-1) передачу, упрощается:
![]() (13)
(13)
На вогнутой кривой в формуле (12) радиус R принимает отрицательное значение. При переключении с низшей на высшую передачу целесообразно начинать переключение передач при движении автопоезда с максимальной скоростью на n-ой передаче.
Таким образом, доказаны эффективность и достаточная точность расчетов скорости движения лесовозных автопоездов при переключении передач. Полученные зависимости и обоснованный новый рациональный метод расчетов могут применяться при моделировании и расчете показателей движения лесовозных автопоездов на ПЭВМ, а также при расчетах вручную, и обеспечивают упразднение итерационных вычислений и оптимизацию расчетов.
Рецензенты:
Григорьев И.В., д.т.н., профессор, заведующий кафедрой Технологии лесозаготовительных производств, ФГБОУ ВПО «Санкт-Петербургский государственный лесотехнический университет имени С.М. Кирова», г. Санкт-Петербург;
Питухин А.В., д.т.н., профессор, директор ИЛИСН ПетрГУ, ФГБОУ ВПО «Петрозаводский государственный университет», г. Петрозаводск.