


Scientific journal
Modern problems of science and education
ISSN 2070-7428
"Перечень" ВАК
ИФ РИНЦ = 0,936
POSSIBILITY TO CREATE AUTOMATED EQUIPMENT TO CONTROL THE SYSTEMATIC DISPLACEMENT OF THE DAM BODY (WEIR BODY)

Поэтому есть необходимость в создании автоматизированного устройства, свободного от указанных недостатков. Оно должно обеспечивать возможность измерения с одной установки двух координат с точностью, порядка 10 – 50 мкм, при этом не должно содержать сложной механики, быть легким и компактным, простым в эксплуатации и иметь возможность быстрой настройки. Новое устройство должно облегчить процесс измерений, увеличить его точность и тем самым увеличить степень безопасности эксплуатации плотины.
Цель исследования
Целью работы является создание работающего прототипа автоматизированного устройства. Это предполагает решение следующих задач: выбор метода измерений, определение принципа построения будущего устройства, исследование его основных узлов, создание и анализ конструкции. В данной статье рассмотрены первые 3 задачи.
Материал и метод исследования
Для реализации устройства, отвечающего заданным требованиям, был выбран метод определения положения струны в полярной системе координат. В этом случае необходимо знать две величины – расстояние до струны Lи угол поворотаφ от нулевого положения Loдо текущего положения струны, и по ним находятся координаты ymax иxmax(рис. 1).
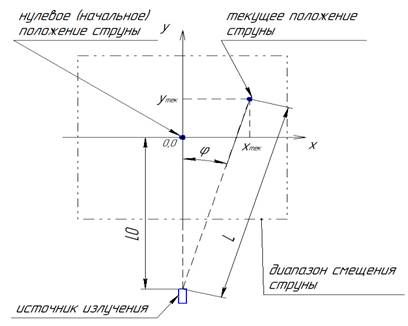
Рис. 1. К пояснению принципа измерения
Наиболее предпочтительным способом измерений является бесконтактный. Поэтому координатомер можно условно разделить на две основные части: первая – это триангуляционный датчик расстояния, а вторая – датчик угла поворота. Триангуляционный метод, на котором основан датчик, выбран потому, что он является одним из распространенных оптико-электронных методов измерения расстояний до объекта в силу простоты реализации [8]. Принцип измерения заключается в том, что любое изменение положения объекта (в нашем случае это струна отвеса) вызывает соответствующее ему изменение положения изображения объекта, строящегося на фотоприемнике[2]. Используя известные параметры оптической системы, можно вывести формулу, связывающую изменения расстояния до объекта с изменением положения светового пятна на приемнике. Нами была выведена такая формула:
![]() ,
,
где ![]() – смещение струны, мм,
– смещение струны, мм, ![]() – перемещение светового пятна на
приемнике, мм,
– перемещение светового пятна на
приемнике, мм, ![]() ,
, ![]() –
расстояние от главной плоскости объектива приемного канала до струны и
плоскости приемника соответственно, мм,
–
расстояние от главной плоскости объектива приемного канала до струны и
плоскости приемника соответственно, мм, ![]() – угол
триангуляции, град.
– угол
триангуляции, град.
Данная формула значительно проще существующих [5], что впоследствии увеличит скорость обработки данных и, как следствие, быстродействие устройства.
В настоящее время создан макет триангуляционного блока устройства (рис. 2). На этом макете подбираются оптимальные параметры, проверяется целесообразность использования тех или иных компонентов (н-р., необходимость соблюдения условия Шейпфлюта) и исследуется точность работы триангуляционного блока на всем диапазоне смещений струны. Этот блок должен будет обеспечивать измерение смещения струны с погрешностью, не превышающей 50 мкм во всем диапазоне измерений.
При разработке макета автоматизированного устройства были определены
следующие параметры триангуляционного блока: угол триангуляции![]() ,задний фокус объектива
,задний фокус объектива![]() , рабочее расстояние:
, рабочее расстояние:![]() , ПЗС – линейка с размером пикселя 8 мкм.
При этом пучок лазерного диода должен иметь гауссовое распределение света и быть
отцентрирован таким образом, чтобы перетяжка гауссового пучка была выставлена
в центр диапазона измерения [2,3]. Для этого в макете предусмотрена возможность
юстировки блока лазерного диода с помощью стойки 5.
, ПЗС – линейка с размером пикселя 8 мкм.
При этом пучок лазерного диода должен иметь гауссовое распределение света и быть
отцентрирован таким образом, чтобы перетяжка гауссового пучка была выставлена
в центр диапазона измерения [2,3]. Для этого в макете предусмотрена возможность
юстировки блока лазерного диода с помощью стойки 5.
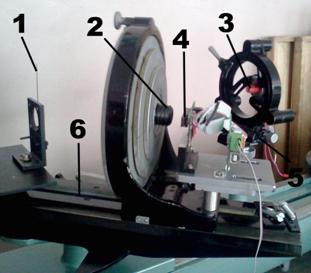
Рис. 2. Макет триангуляционного блока автоматизированного устройства, где: 1 – струна, 2 – объектив приемного канала, 3 – лазерный диод (ЛД), 4 – ПЗС–линейка, 5 – стойка ЛД, 6 – поворотное устройство, с помощью которого устанавливается угол триангуляции
Приемник излучения в координатомере устанавливается под определенным углом (Шейпфлюта) γ к оптической оси собирающего объектива (рис. 3).
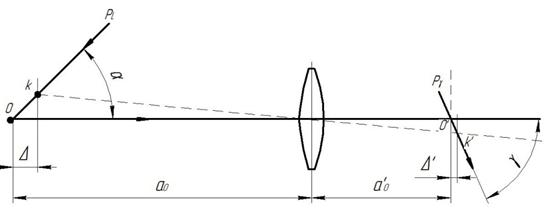
Рис. 3. К пояснению условия Шейпфлюта
Угол γ находится при выполнении условия Шейпфлюта согласно выражению:
![]() , (1)
, (1)
где ![]() – увеличение оптической системы.
– увеличение оптической системы.
Плоскость, проходящая через зондирующий луч, оказывается при этом оптически сопряженной с выходной плоскостью, поэтому любая точка зондирования проецируется в плоскость расположения фотоприемника без каких-либо дефокусировок [5,6].
Для этих целей в установке предусмотрена возможность точного поворота плоскости приемника и подвижки для фокусировки изображения светового пятна. Точность установки приемника определяется дифракционной глубиной TД резкости объектива и определяется из выражения
![]() , (2)
, (2)
где λ – длина волны лазера, А – апертура приемного объектива.
При этом допуск σ на установку угла γ составляет
 , (3)
, (3)
здесь L– длина светочувствительной части приемника, равная 18 мм.
В качестве проецирующей системы использовался простой фотообъектив с исправленной кривизной поля зрения. Влиянием остальных аберраций можно пренебречь вследствие малости размера приемника. Сам объектив имеет возможность перемещения для изменения рабочего расстояния (переднего отрезка – от струны до объектива приемной системы).
Для оценки положения изображения светового пятна можно использовать различные алгоритмы, основанные на методах обработки изображений. На эту тему проведены исследования и сделаны предположения о наиболее предпочтительных методах для использования в триангуляционной системе.
Т.к. лазерный пучок имеет гауссово распределение, то мы знаем теоретическую функциональную зависимость светового пятна, поэтому для определения энергетического центра можно использовать метод наименьших квадратов [4,7]. С помощью него происходит поиск теоретической функциональной зависимости, которая предельно близко описывает дискретно полученные значения, т.е. сумма квадратов отклонений значений теоретической зависимости и экспериментально полученных значений минимальна.
Эксперименты проводились следующим образом. На оптической скамье задавалось начальное положение струны и на ПЗС-линейке фиксировалось соответствующее положение светового пятна, вычислялся его энергетический центр и соответствующий ему пиксель линейки; затем струна смещалась вдоль оптической скамьи на определенное расстояние, которое считалось истинным смещением струны, определялся энергетический центр светового пятна во втором положении и вычислялось его перемещение на приемнике; далее по выведенной ранее формуле вычислялось смещение струны. По разнице истинного и расчетного смещений струны определялась абсолютная погрешность измерений.
Результаты исследования
Было проведено 3 серии измерений. Струна перемещалась в диапазоне от нуля до 75 мм. По полученным данным построены графики зависимости абсолютной погрешности измерений от величины смещения струны (рис. 4 а). Как видно из графиков, полученные результаты имеют достаточно большую степень повторяемости.
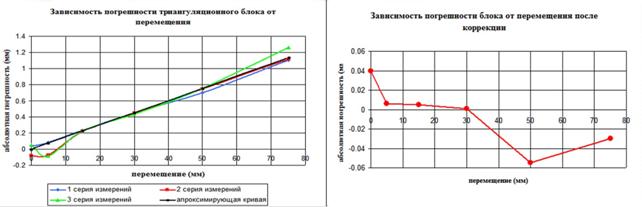
а) б)
Рис. 4. Погрешности измерений
Погрешность измерений линейно возрастает с увеличением смещения струны, это позволяет провести аппроксимацию данных и получить теоретическую функциональную зависимость, которую можно использовать для коррекции систематических погрешностей (рис. 4 б). Т.о., остаются лишь случайные составляющие погрешности измерений, причины появления которых необходимо установить и, по возможности, устранить. После коррекции максимальное значение погрешности измерения составляет менее 0,06 мм, что соответствует относительной погрешности измерений в 0,1%. Проанализировать причины случайных составляющий погрешности помогает вид светового пятна на ФП: оно несимметрично и имеет побочные максимумы,которые являются следствиемспеклов, вызванных шероховатостью поверхности струны.
Заключение
Проведенные макетирование и исследования показали возможность создания автоматизированного устройства для контроля положения тела плотины, обладающего требуемой точностью измерений, хорошей воспроизводимостью результатов.
Было также установлено, что расфокусировка не повлияет на точность измерений, а, следовательно, ФП не обязательно устанавливать под углом Шейпфлюта. Это упростит будущую конструкцию устройства. Также для увеличения точности измерений предполагается заменить лазерный диод на светодиод с необходимой фокусирующей оптической системой. Данная замена исключит влияние спеклов и избавит от необходимости стабилизации энергетического центра лазерного пучка.
Рецензенты:Кузьмин В.Н., д.т.н., профессор, заместитель генерального директора по оптике и фотометрии, ООО «Научно-техническое предприятие «ТКА», г. Санкт-Петербург;
Дич Л.З., д.т.н., гл. инженер ЗАО «Петер-Сервис», г. Санкт-Петербург.
Библиографическая ссылка
Бурков А.С., Митрофанов С.С. ВОЗМОЖНОСТЬ СОЗДАНИЯ АВТОМАТИЗИРОВАННОГО УСТРОЙСТВА ДЛЯ КОНТРОЛЯ ПЛАНОВЫХ СМЕЩЕНИЙ ТЕЛА ПЛОТИНЫ // Современные проблемы науки и образования. 2015. № 1-1. ;URL: https://science-education.ru/en/article/view?id=18336 (дата обращения: 19.06.2026).