


Scientific journal
Modern problems of science and education
ISSN 2070-7428
"Перечень" ВАК
ИФ РИНЦ = 0,936
REVIEW OF COLLISION RISK ASSESSMENT METHODS FOR VESSEL TRAFFIC SYSTEMS

Безопасное судовождение – одна из основных категорий, связанных с эксплуатацией морского транспорта [7]. Последние годы характеризуются постоянным ростом объёмов морских перевозок. При этом всё возрастающая интенсивность движения в зонах оживленного судоходства приводит к постоянному повышению нагрузки на судоводителей [1].
В этих условиях знаний, опыта и интуиции судоводителя уже недостаточно, чтобы гарантировать безопасность движения (здесь и далее под безопасностью движения понимается навигационная безопасность). Поэтому все более востребованными становятся специальные методы предупреждения столкновений судов, ориентированные на реализацию в автоматизированных информационных системах, используемых на мостике судна или в береговых центрах управления движением судов [3].
Несмотря на развитие технологий автономных движущихся объектов (например, беспилотных летательных аппаратов, наземных роботов и т.п.) методы управления их движением не применимы для судоводительской практики. Это связано с тем, что каждая ситуация, сложившаяся при движении судов, является по-своему уникальной и зависящей от множества факторов: Международных правил предупреждения столкновений судов (МППСС), правил судоходства на конкретной акватории, особенностей морской среды (течение, волнение), погодных условий, особенностей движения других судов, находящихся на акватории и т.д. Кроме того, динамика судна как объекта, движущегося в жидкой среде, также исключительно сложна. Современная правовая база прямо регламентирует, что управление судном есть исключительное право его капитана. В своих действиях судоводитель лишь руководствуется информацией, предоставляемой различными навигационными средствами.
С учетом этой специфики в судовождении сложились и используются свои особые подходы к управлению движением [4, 6]. С исследовательской точки зрения методы обеспечения навигационной безопасности движения судов можно разделить на три категории: методы заблаговременного обнаружения возможности столкновения судов (оценки риска столкновения), способы маневрирования для ухода судна от столкновения (предупреждения столкновений) и методы планирования траектории безопасного движения судна [13]. Настоящая работа посвящена обзору наиболее известных методов оценки риска столкновения судов.
Основные понятия, используемые в управлении движением судов. В судовождении используется специфическая терминология. Так, под управляемым судном понимается судно, находящееся под непосредственным контролем (например, собственное судно). По отношению к остальным судам применяется термин судно-цель. Все объекты, находящиеся на акватории, кроме управляемого судна (как суда, так и не являющиеся судами, например, береговая линия), называются препятствиями. Статические объекты – покоящиеся объекты. Динамические объекты – движущиеся суда, меняющие скорость или курс. Метод считается учитывающим влияние внешней среды, если он учитывает направление и силу ветра или течения. Метод считается оптимизирующим, если он включает оптимизирующие процедуры, например, вычисляет кратчайший путь, определяет траекторию с минимальным количеством маневров и т.п. Ограниченные воды – это акватории, ограниченные береговой линией (например, бухты, проливы). Динамическая модель движения судна – модель движения судна, учитывающая особенности его движения в жидкой среде.
В методах оценки риска столкновения базовым понятием является дистанция наибольшего сближения судов (closest point of approach (CPA)). Считается, что при безопасном движении дистанция наибольшего сближения судов должна быть больше некоторого критического значения. Учитываются также величины: «время движения до точки наибольшего сближения судов» (time of closest point of approach (TCPA)) и «расстояние до точки наибольшего сближения судов» (distance to closest point of approach (DCPA)). Для моделирования риска столкновения используется представление о некоторой «зоне безопасности» вокруг каждого судна, называемой также «корабельный домен».
Методы оценки риска столкновения. Фудзии и Танака [14] были первыми, кто ввёл понятие «корабельный домен». Они предложили корабельный домен в форме эллипса, опираясь на результаты статистических исследований движения судов во внутренних водах Японии.
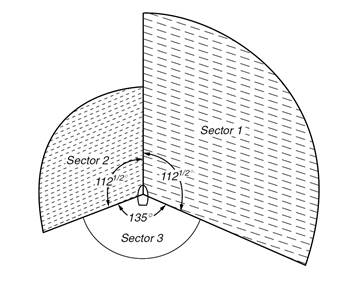
Рисунок 1. Корабельный домен Гудвин
Развивая их идею, Гудвин [12] предложила корабельный домен, разделённый на три сектора. В её модели считается, что домен – область вокруг судна, которую судоводитель предпочитает видеть свободной от других объектов. Размеры этой зоны различны, в зависимости от того, движутся ли суда навстречу друг другу, совершает ли судно обгон или стоит на месте (рис. 1). Радиус секторов корабельного домена Гудвин – это критические значения величины CPA для каждого из этих трёх возможных сценариев движения, зависящие от таких факторов как интенсивность движения, длина судна, максимальная скорость судна и т.п. Меньший радиус левого сектора связан с правилами МППСС, так как нахождение препятствий по левому борту – более вероятная и естественная ситуация, чем нахождение их по правому борту: при встречном движении суда расходятся левыми бортами. Малый размер кормового сектора также связан с особенностями судовождения: судоводитель не имеет возможности непосредственно контролировать ситуацию у себя за кормой.
Корабельный домен Дэвиса [11] развивает идею Гудвин. Он представляет собой эллипс со смещённым центром, разделённый на секторы, имеющие тот же смысл, что и у Гудвин (рис. 2). Такой «гладкий» домен оказывается удобнее для построения математических моделей. Кроме того, Дэвис также предложил концепцию «активного домена» – это домен увеличенного размера, служащий индикатором для судоводителя: при вторжении в область активного домена других объектов судоводитель должен принять решение о совершении маневра уклонения.
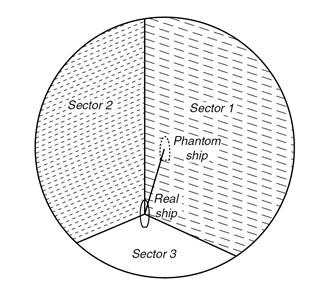
Рисунок 2. Корабельный домен Дэвиса
Корабельный домен Колдуэлла [8] имеет различную конфигурацию в зависимости от того или иного сценария сближения судов. Так, в случае встречного движения в домене полностью отсутствует кормовая часть, поскольку в этом случае ею можно пренебречь. В случае обгона домен имеет эллипсоидальную форму, аналогично модели Фудзии и Танака.
Корабельный домен Колли [9] был разработан на основе домена Дэвиса. Модель безопасности движения, разработанная Колли, берёт начало из области управления воздушным движением и названа «range-to-domain over range-rate (RDRR)». В основу модели было положено отношение расстояния от судна-цели до домена управляемого судна (range-to-domain) к скорости изменения этого расстояния (range-rate). Сравнивая эту величину с критическим значением, модель может определить точку или время начала маневра уклонения. Эта концепция получила широкое распространение и использовалась целым рядом других авторов, например [10]; в этой работе модель RDRR модифицирована для автоматического обнаружения опасного сближения и определения типа такого сближения (обгон или встречное движение) путем дополнительного учета расстояния и времени до сближения.
Корабельный домен Цзю [15] – это особое представление зоны безопасности вокруг судна, учитывающее субъективные особенности восприятия судоводителем окружающей обстановки. Его определение основано на нейронных сетях, обучаемых методом обратного распространения ошибки, что позволяет частично учесть влияние внешней среды, не прибегая при этом к сложным классическим детерминированным математическим моделям её описания. Структура нейронной сети подобрана так, чтобы оперировать безразмерными переменными, такими как соотношение длины домена к его ширине, нормированное расстояние, нормированная дальность видимости и т.п. Настраиваемые коэффициенты нейронной сети также являются безразмерными величинами.
Из разработок последних лет стоит отметить оригинальный метод оценки риска столкновения, предложенный В.М. Букатым и С.Ю. Морозовой [2]. В этом способе вычисляются моменты времени выхода двух сближающихся судов на одну и ту же параллель и один и тот же меридиан. Если разница между этими моментами времени окажется меньше критической, то суда считаются опасно сближающимися. Таким образом, фактически данный способ неявно использует корабельный домен в форме эллипса.
Следует также отметить разработку М.А. Коноплёва [5], где используется корабельный домен в форме эллипса, а оценка риска столкновения делается нечеткой системой, дополнительно учитывающей кинематические свойства движения судна при маневрировании.
Характеристики описанных здесь методов оценки риска столкновения с точки зрения их возможности учитывать правила судовождения (МППСС), решать задачу для коллективного движения множества судов, решать задачу не только на открытой воде, но и в ограниченных водах, учитывать динамику движения судна, учитывать возможность изменения судном-целью скорости и курса, сведены в таблицу.
Методы оценки риска столкновения
|
Метод/модель |
МППСС |
Кол-во судов > 2 |
Огранич. воды |
Динам. модель движения судна |
Измен. курса судна |
Измен. скор. судна |
|
Корабельный домен Фудзии и Танака |
- |
- |
- |
- |
- |
- |
|
Корабельный домен Гудвина |
+ |
- |
- |
- |
- |
- |
|
Корабельный домен Дэвиса |
+ |
- |
+ |
- |
- |
- |
|
Корабельный домен Колдуэлла |
+ |
- |
- |
- |
- |
- |
|
Корабельный домен Колли |
+ |
- |
- |
- |
- |
- |
|
Корабельный домен Цзю |
+ |
- |
- |
- |
- |
- |
|
«Временной» корабельный домен Букатого и Морозовой |
- |
- |
- |
- |
- |
- |
|
Нечеткая система Коноплёва |
+ |
- |
- |
+/- |
- |
- |
Во всех методах экстраполяция движения судов происходит в предположении, что движение является прямолинейным и равномерным. Если экстраполяция движения судов приводит к «вторжению» в область корабельного домена, то считается зафиксированным риск столкновения и судоводителю нужно принять решение о начале маневра уклонения. Все описанные здесь представления корабельных доменов требуют задания критической величины CPA для пары «судно-судно», что является нетривиальной задачей.
Заключение. Существенным недостатком рассмотренных методов является сведение ими навигационной обстановки на акватории к набору пар «судно-судно» и отсутствие решения задачи для нескольких судов в целом. За исключением «активного домена» Дэвиса все описанные представления не дают полноценной возможности для работы в ограниченных водах. За исключением нечеткой системы Коноплёва (частично) все они не учитывают динамику движения судов и возможность их неравномерного движения. Таким образом, остаются актуальными исследования в области обеспечения навигационной безопасности коллективного движения судов, направленные на разработку новых подходов, лишённых перечисленных недостатков. Наиболее перспективным путем для решения указанной задачи представляется использование модельных представлений, основанных на идеях систем нечеткой логики. Они позволяют гармонично учесть особенности судовождения на конкретной акватории и «субъективную» компоненту при принятии решений судоводителем (капитаном судна) и/или оператором береговой системы управления движением судов.
Рецензенты:
Номоконова Н.Н., д.т.н., профессор, профессор кафедры Информационных технологий и систем Владивостокского государственного университета экономики и сервиса Минобразования РФ, г. Владивосток;
Кривошеев В.П., д.т.н., профессор, профессор кафедры Информационных технологий и систем Владивостокского государственного университета экономики и сервиса Минобразования РФ, г. Владивосток.
Библиографическая ссылка
Гриняк В.М., Гриняк В.М. МЕТОДЫ ОЦЕНКИ РИСКА СТОЛКНОВЕНИЯ В СИСТЕМАХ УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДОВ // Современные проблемы науки и образования. 2015. № 1-1. ;URL: https://science-education.ru/en/article/view?id=18270 (дата обращения: 16.05.2026).