


Scientific journal
Modern problems of science and education
ISSN 2070-7428
"Перечень" ВАК
ИФ РИНЦ = 0,936
SOLUTION HARD EDGES PROBLEMS OF STRUCTURAL MECHANICS (CALCULATION OF SHELLS INTEGRAL AND SB FRAMES) OF VINOGRADOV´S METHOD (WITHOUT ORTHONORMALITY)

Система линейных обыкновенных дифференциальных уравнений имеет вид:
![]() ,
,
где ![]() –
искомая вектор-функция задачи размерности 8х1,
–
искомая вектор-функция задачи размерности 8х1, ![]() –
производная искомой вектор-функции размерности 8х1,
–
производная искомой вектор-функции размерности 8х1, ![]() –
квадратная матрица коэффициентов дифференциального уравнения размерности 8х8,
–
квадратная матрица коэффициентов дифференциального уравнения размерности 8х8, ![]() – вектор-функция внешнего воздействия на
систему размерности 8х1.
– вектор-функция внешнего воздействия на
систему размерности 8х1.
Краевые условия имеют вид: ![]()
где ![]() –
значение искомой вектор-функции на левом крае х=0 размерности 8х1,
–
значение искомой вектор-функции на левом крае х=0 размерности 8х1, ![]() – прямоугольная горизонтальная матрица
коэффициентов краевых условий левого края размерности 4х8,
– прямоугольная горизонтальная матрица
коэффициентов краевых условий левого края размерности 4х8, ![]() – вектор внешних воздействий на левый
край размерности 4х1,
– вектор внешних воздействий на левый
край размерности 4х1,
![]() – значение искомой вектор-функции на
правом крае х=1 размерности 8х1,
– значение искомой вектор-функции на
правом крае х=1 размерности 8х1, ![]() – прямоугольная
горизонтальная матрица коэффициентов краевых условий правого края размерности
4х8,
– прямоугольная
горизонтальная матрица коэффициентов краевых условий правого края размерности
4х8, ![]() – вектор внешних воздействий на правый
край размерности 4х1.
– вектор внешних воздействий на правый
край размерности 4х1.
В случае, когда система
дифференциальных уравнений имеет матрицу с постоянными коэффициентами ![]() =const, решение задачи Коши
имеет вид [2]:
=const, решение задачи Коши
имеет вид [2]:
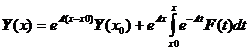 ,
,
где ![]() , где
, где ![]() - единичная матрица.
- единичная матрица.
Матричная экспонента ещё может
называться матрицей Коши или матрициантом и может обозначаться в виде ![]() . Тогда решение задачи Коши может быть
записано в виде
. Тогда решение задачи Коши может быть
записано в виде ![]() ,
,
где 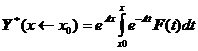 это
вектор частного решения неоднородной системы обыкновенных дифференциальных
уравнений.
это
вектор частного решения неоднородной системы обыкновенных дифференциальных
уравнений.
Вместо формулы для вычисления вектора
частного решения неоднородной системы дифференциальных уравнений в виде [1] предлагается использовать следующую
формулу для каждого отдельного участка интервала интегрирования  .
.
Вычисление этого вектора частного
решения неоднородной системы дифференциальных уравнений производиться при
помощи представления матрицы Коши под знаком интеграла в виде ряда и
интегрирования этого ряда поэлементно. Это справедливо для случая системы дифференциальных
уравнений с постоянной матрицей коэффициентов ![]() =const. Для случая
дифференциальных уравнений с переменными коэффициентами в приведенной выше
формуле для каждого участка может использоваться осредненная матрица
=const. Для случая
дифференциальных уравнений с переменными коэффициентами в приведенной выше
формуле для каждого участка может использоваться осредненная матрица ![]() коэффициентов системы дифференциальных
уравнений.
коэффициентов системы дифференциальных
уравнений.
Вектор ![]() может
рассматриваться на участке
может
рассматриваться на участке ![]() приближенно в виде
постоянной величины
приближенно в виде
постоянной величины ![]() , что позволяет вынести его
из-под знака интеграла, что приводит к совсем простому ряду для вычислений на
рассматриваемом участке. Рассмотрим вариант, когда шаги интервала
интегрирования выбираются достаточно малыми, что позволяет рассматривать вектор
, что позволяет вынести его
из-под знака интеграла, что приводит к совсем простому ряду для вычислений на
рассматриваемом участке. Рассмотрим вариант, когда шаги интервала
интегрирования выбираются достаточно малыми, что позволяет рассматривать вектор
![]() на участке
на участке ![]() приближенно
в виде постоянной величины
приближенно
в виде постоянной величины ![]() , что позволяет
вынести этот вектор из-под знаков интегралов. Тогда получаем ряд для вычисления
вектора частного решения неоднородной системы дифференциальных уравнений на малом участке
, что позволяет
вынести этот вектор из-под знаков интегралов. Тогда получаем ряд для вычисления
вектора частного решения неоднородной системы дифференциальных уравнений на малом участке ![]() :
:
![]()
Если участок ![]() не мал, то его можно поделить на подучастки
и тогда можно предложить следующие рекуррентные (итерационные) формулы для
вычисления частного вектора: имеем
не мал, то его можно поделить на подучастки
и тогда можно предложить следующие рекуррентные (итерационные) формулы для
вычисления частного вектора: имеем ![]() , также имеем формулу
для отдельного подучастка.
, также имеем формулу
для отдельного подучастка.
Тогда: ![]() ,
,![]() .
.
Подставим ![]() в
в ![]() и получим:
и получим:
![]() .
.
Сравним это выражение с формулой ![]()
и
получим, очевидно, что ![]() и для частного
вектора получаем формулу
и для частного
вектора получаем формулу ![]() . То есть вектора
подучастков
. То есть вектора
подучастков![]() не просто складываются друг с другом, а
с участием матрицы Коши подучастка.
не просто складываются друг с другом, а
с участием матрицы Коши подучастка.
Аналогично можем записать ![]() и подставить сюда формулу для
и подставить сюда формулу для![]() и т.д.
и т.д.
Из теории матриц [2] известно
свойство перемножаемости матричных экспонент (матриц Коши): ![]() .
.
В случае, когда система
дифференциальных уравнений имеет матрицу с переменными коэффициентами ![]() , решение задачи Коши можно искать (как
это известно из теории матриц) при помощи свойства перемножаемости матриц Коши.
То есть интервал интегрирования разбивается на малые участки и на малых
участках матрицы Коши приближенно вычисляются по формуле для постоянной матрицы
в экспоненте. А затем матрицы Коши, вычисленные на малых участках,
перемножаются:
, решение задачи Коши можно искать (как
это известно из теории матриц) при помощи свойства перемножаемости матриц Коши.
То есть интервал интегрирования разбивается на малые участки и на малых
участках матрицы Коши приближенно вычисляются по формуле для постоянной матрицы
в экспоненте. А затем матрицы Коши, вычисленные на малых участках,
перемножаются:
![]() ,
,
где матрицы Коши приближенно вычисляются по формуле:
![]() , где
, где ![]() .
.
В этом случае использования перемножения
матричных экспонент, то есть в случае кусочно-константной аппроксимации матрицы
![]() системы обыкновенных дифференциальных
уравнений (ОДУ), оценка точности в литературных источниках не встречается. На
практике можно удостоверяться в точности расчетов путем сравнительного расчета
при разных шагах, на которые делится интервал интегрирования, или можно сразу
разделять интервал интегрирования на очевидно малые шаги интегрирования.
системы обыкновенных дифференциальных
уравнений (ОДУ), оценка точности в литературных источниках не встречается. На
практике можно удостоверяться в точности расчетов путем сравнительного расчета
при разных шагах, на которые делится интервал интегрирования, или можно сразу
разделять интервал интегрирования на очевидно малые шаги интегрирования.
В тоже время можно производить вычисления и с заранее известной точностью. Для этого следует вычислять матрицы Коши не как матричные экспоненты от осредненных аргументов, а можно использовать для вычисления векторов, входящих в матрицы Коши, методы типа методов Рунге-Кутты. Для вычисления матриц Коши методами типа Рунге-Кутты используется стартовая (начальная) единичная матрица. А для вычисления вектора частного решения неоднородной системы ОДУ берется начальный нулевой вектор. В случае применения методов типа Рунге-Кутты оценки погрешностей хорошо известны.
Метод решения жестких краевых задач без ортонормирования – метод сопряжения участков, выражаемых матричными экспонентами (матрицами Коши).
Идея преодоления трудностей неустойчивого счета путем разделения интервала интегрирования на сопрягаемые участки принадлежит д.ф.-м.н. Юрию Ивановичу Виноградову [2]. А выражение идеи разделения и сопряжения через формулы теории матриц, то есть через матричные экспоненты (матрицы Коши) принадлежит к.ф.-м.н. Алексею Юрьевичу Виноградову.
Разделим интервал интегрирования
краевой задачи, например, на 3 участка. Будем иметь точки (узлы), включая края ![]() .
.
Имеем краевые условия в виде ![]()
Можем записать матричные уравнения
сопряжения участков (при переходах от левых точек к правым точкам участков
интервала интегрирования, то есть при переходах типа от ![]() к
к![]() , хотя вполне можно было бы записать и
уравнения при переходах в обратном направлении, то есть при переходах типа от
, хотя вполне можно было бы записать и
уравнения при переходах в обратном направлении, то есть при переходах типа от ![]() к
к ![]() ):
):
![]() ,
,
![]() ,
,
![]() .
.
Это мы можем переписать в виде, более удобном для нас далее:
![]() ,
,
![]() , (1)
, (1)
![]() .
.
где ![]() -
единичная матрица.
-
единичная матрица.
В итоге получаем систему линейных алгебраических уравнений:
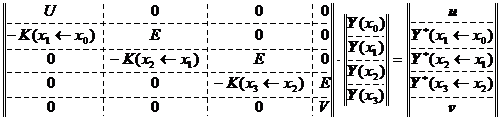 . (2)
. (2)
Эта система решается методом Гаусса с выделением главного элемента.
Оказывается, что применять ортонормирование в рамках предлагаемого метода не нужно.
Это объясняется тем, что на каждом отдельном участке интервала интегрирования вычисления матриц Коши (матричных экспонент) ведется каждый раз отдельно (независимо от других участков) со стартом численного интегрирования (либо в виде матричной экспоненты либо методами типа Рунге-Кутты) от начальной единичной матрицы, то есть от ортонормированной (единичной) матрицы, что происходит естественно без каких-либо дополнительных операций типа операций ортонормирования векторов, которые применяются в методе С.К.Годунова, что существенно упрощает программирование предлагаемого метода по сравнению с методом С.К.Годунова.
В точках вблизи узлов решение
находится путем решения соответствующих задач Коши с началом в i-ом узле ![]() .
.
Расчет составных оболочек вращения.
Пусть имеем, например, 3 участка интервала интегрирования составной оболочки вращения, где каждый участок может выражаться своими дифференциальными уравнениями и физические параметры могут выражаться по-разному – разными формулами на разных участках:

Рис. 1
В общем
случае (на примере участка 12) физические параметры участка (вектор ![]() ) выражаются через искомые параметры
системы обыкновенных дифференциальных уравнений этого участка (через вектор
) выражаются через искомые параметры
системы обыкновенных дифференциальных уравнений этого участка (через вектор ![]() ) следующим образом
) следующим образом ![]() , где матрица
, где матрица ![]() -
квадратная невырожденная.
-
квадратная невырожденная.
При переходе точки сопряжения можем
записать в общем виде (но на примере точки сопряжения ![]() :
:
![]() , где
, где ![]() -
дискретное приращение физических параметров (сил, моментов) при переходе с
участка «01» на участок «12», а матрица
-
дискретное приращение физических параметров (сил, моментов) при переходе с
участка «01» на участок «12», а матрица ![]() квадратная
невырожденная диагональная и состоит из единиц и минус единиц на главной
диагонали для установления правильного соответствия принятых положительныхнаправлений сил, моментов,
перемещений и углов при переходе с участка «01» на участок «12», которые могут
быть разными (в разных дифференциальных уравнениях разных сопрягаемых участков)
– в уравнениях слева от точки сопряжения и в уравнениях справа от точки
сопряжения.
квадратная
невырожденная диагональная и состоит из единиц и минус единиц на главной
диагонали для установления правильного соответствия принятых положительныхнаправлений сил, моментов,
перемещений и углов при переходе с участка «01» на участок «12», которые могут
быть разными (в разных дифференциальных уравнениях разных сопрягаемых участков)
– в уравнениях слева от точки сопряжения и в уравнениях справа от точки
сопряжения.
Два последних уравнения образуют ![]() .
.
В точке ![]() аналогично
получим
аналогично
получим ![]() .
.
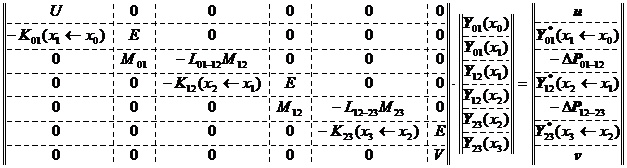
Если бы оболочка состояла бы из
одинаковых участков, то мы могли бы записать в объединенном матричном виде
систему линейных алгебраических уравнений в форме (2). Но в нашем случае
оболочка состоит из 3 участков, где средний участок можно считать, например,
шпангоутом, выражаемым через свои дифференциальные уравнения. Тогда вместо
векторов ![]() ,
, ![]() ,
, ![]() ,
, ![]() мы
должны рассмотреть вектора:
мы
должны рассмотреть вектора:
![]() (смотри рис.1).
(смотри рис.1).
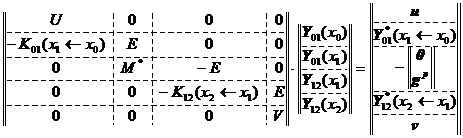
Тогда матричные уравнения ![]() и (1) примут вид:
и (1) примут вид:
![]()
![]() ,
,
![]() ,
,
![]() ,
,
![]() ,
,
![]() .
.
Тогда получаем итоговую систему линейных алгебраических уравнений:
Расчет оболочек со шпангоутами, когда шпангоуты выражаются алгебраическими уравнениями.
Рассмотрим случай, когда шпангоут (в
точке ![]() ) выражается не через дифференциальные
уравнения, а через алгебраические уравнения.
) выражается не через дифференциальные
уравнения, а через алгебраические уравнения.
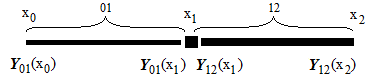
Рис. 2
Выше мы записывали, что ![]() .
.
Можем представить вектор ![]() силовых факторов и перемещений в виде:
силовых факторов и перемещений в виде:
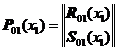 ,
,
где ![]() -
вектор перемещений,
-
вектор перемещений, ![]() - вектор сил и моментов.
- вектор сил и моментов.
Алгебраическое уравнение для
шпангоута имеет вид ![]() , где G – матрица жесткости шпангоута, R – вектор перемещений шпангоута,
, где G – матрица жесткости шпангоута, R – вектор перемещений шпангоута, ![]() – вектор силовых факторов, которые
действуют на шпангоут.
– вектор силовых факторов, которые
действуют на шпангоут.
В точке шпангоута имеем ![]() , то есть нет разрыва в перемещениях
, то есть нет разрыва в перемещениях ![]() , (где
, (где ![]() –
нулевой вектор), но есть результирующий вектор силовых факторов
–
нулевой вектор), но есть результирующий вектор силовых факторов ![]() , который складывается из сил и моментов
слева плюс сил и моментов справа от точки шпангоута. Тогда получаем:
, который складывается из сил и моментов
слева плюс сил и моментов справа от точки шпангоута. Тогда получаем:
![]() ,
, ![]() .
.
Запишем ,
где для удобства было введено переобозначение
,
где для удобства было введено переобозначение![]() .
Тогда можем записать:
.
Тогда можем записать: ![]() и введем в рассмотрение вектор
и введем в рассмотрение вектор
![]() :
:

Запишем матричные уравнения для этого случая (рис.2):
![]()
![]() ,
,
![]() ,
,
![]() .
.
Распишем вектор ![]() , тогда:
, тогда:  .
.
Для обеспечения негромоздкости введем
обозначение 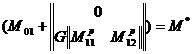 и получим
и получим ![]() .
.
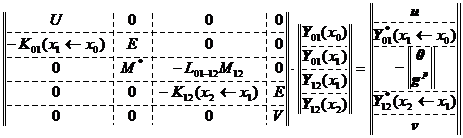
Таким образом, получаем итоговую систему линейных алгебраических уравнений:
 .
.
Если к шпангоуту приложено внешнее
силовое-моментное воздействие ![]() , то
, то
![]() следует переписать в виде
следует переписать в виде  , тогда:
, тогда:
 .
.
Тогда получаем ![]() .
.
Итоговая система линейных алгебраических уравнений примет вид:
 . (3)
. (3)
Расчет оболочек составных и со шпангоутами, когда их уравнения выражаются не через абстрактные вектора, а через вектора, состоящие из конкретных физических параметров.
Рассмотрим случай, когда части
оболочечной конструкции и шпангоут выражаются через вектора состояния (типа ![]() ), которые (в частном случае) совпадают с
векторами физических параметров (типа
), которые (в частном случае) совпадают с
векторами физических параметров (типа ![]() -
перемещения, угол, силы, момент). Тогда матрицы типа
-
перемещения, угол, силы, момент). Тогда матрицы типа ![]() будут
единичными:
будут
единичными: ![]() . И пусть положительные направления
физических параметров одинаковы для всех частей оболочки и шпангоута (
. И пусть положительные направления
физических параметров одинаковы для всех частей оболочки и шпангоута (![]() ).
).
Тогда будем иметь уравнения ![]() ,
, ![]() ,
, ![]() в виде
в виде ![]() ,
, ![]() ,
, ![]() , где
E – единичная матрица.
, где
E – единичная матрица.
Тогда: ![]() ,
,  ,
,
 ,
, ![]() ,
,
 ,
,
![]() , где
, где 
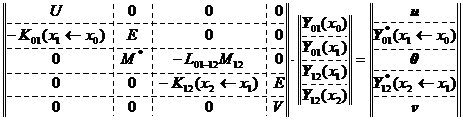
Итоговая система линейных алгебраических уравнений (3) примет вид:
 ,
,
где  .
Это означает, что уравнение
.
Это означает, что уравнение ![]() принимает вид
принимает вид 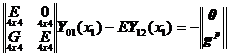 или
или
 .
.
Это означает, что ![]() , (нет скачка в перемещениях и угле) и
, (нет скачка в перемещениях и угле) и ![]() (равновесие шпангоута), то есть
(равновесие шпангоута), то есть ![]() (перемещения и угол: нет разрыва) и
(перемещения и угол: нет разрыва) и ![]() , где
, где ![]() (силы
и момент: равновесие), что и означает наличие шпангоута.
(силы
и момент: равновесие), что и означает наличие шпангоута.
Рецензенты:
Капустян С.Г., д.т.н., профессор, заведующий отделом НИИ многопроцессорных вычислительных систем имени академика А.В. Каляева ФГФОУ ВПО "Южный федеральный университет", г. Ростов-на-Дону;
Калинин В.В., д.ф.-м.н., профессор, заместитель директора "Волгоград НИПИ нефти", г. Волгоград.
Библиографическая ссылка
Виноградов Ю.И., Виноградов А.Ю. РЕШЕНИЕ ЖЕСТКИХ КРАЕВЫХ ЗАДАЧ СТРОИТЕЛЬНОЙ МЕХАНИКИ (РАСЧЕТ ОБОЛОЧЕК СОСТАВНЫХ И СО ШПАНГОУТАМИ) МЕТОДОМ ВИНОГРАДОВЫХ (БЕЗ ОРТОНОРМИРОВАНИЯ) // Современные проблемы науки и образования. 2015. № 1-1. ;URL: https://science-education.ru/en/article/view?id=17529 (дата обращения: 11.07.2026).