



Метод экспертизы объектов транспортной инфраструктуры
Для экспертизы объектов транспортной инфраструктуры разработан метод, который предусматривает выполнение двух основных этапов работ. Первый этап – полевые работы. Сбор данных об объектах транспортной инфраструктуры осуществляется с помощью мобильной лаборатории, позволяющей выполнить цифровую непрерывную видеосъемку дороги на скорости 40 – 80 км/ч и привязку объектов с помощью глобальной системы позиционирования GPS. Второй этап – камеральные работы, выполняемые специалистами в области организации дорожного движения (ОДД) с использованием системы учета геометрических параметров проезжей части [5].
Сбор данных
Оборудование передвижной лаборатории включает в себя 3 IP-камеры, каждая из которых формирует поток видеоданных разрешением Full HD частотой 30 кадров в секунду, имеет степень защиты IP66 от проникновения пыли и воды, GPS-приемник с высокой точностью позиционирования, ноутбук, коммутатор, поддерживающий технологию Power over Ethernet, для питания камер через стандартную витую пару.
GPS предоставляет системе возможность круглосуточного получения точных координат и времени. Данные передаются в ноутбук из GPS-приемника с частотой 10 Гц. По данным, полученным с помощью GPS, с высокой точностью воспроизводится маршрут, пройденный передвижной лабораторией. GPS-данные представлены в формате NMEA 0183. Время в формате UTC, координаты в формате WGS-84, скорость в узлах и высота над уровнем моря в метрах определяется путем распознавания сообщений GPRMC и GPGGA.
Программное обеспечение, разработанное для мобильной лаборатории, обеспечивает:
· чтение данных в формате NMEA с GPS приемника, подключенного к USB порту ноутбука через виртуальный COM-порт;
· выбор картографического сервиса (Google maps, Bing maps, ArcGIS, OpenStreetMap, Яндекс карты);
· отображение текущего местоположения и траектории движения передвижной лаборатории на карте;
· запись GPS данных в файл на жесткий диск ноутбука;
· использование в качестве источника геоданных интернета или кэша для работы в автономном режиме;
· захват видео с IP-камер и вывод изображения на экран ноутбука;
· кодирование и запись видео на жесткий диск ноутбука [3].
Программное обеспечение работает в многопоточном режиме. Для работы с каждой из IP-камер и для записи GPS-трека выделяется отдельный поток выполнения. В каждый момент времени изображение с определенной камеры передается на экран ноутбука в уменьшенном разрешении и записывается в видеофайл в разрешении 1920×1080 пикселей.
В целях снижения нагрузки на процессор ноутбука для вывода изображений на экран применяется кроссплатформенная открытая графическая библиотека OpenGL.
Захват, кодирование и запись видео осуществляется с помощью набора свободных библиотек с открытым исходным кодом FFmpeg, которые позволяют записывать, конвертировать и передавать цифровые аудио- и видеозаписи в различных форматах.
Для управления потоком видеоданных используется потоковый протокол реального времени RTSP, передача потоковых данных осуществляется транспортным протоколом TCP, который обеспечивает надежную передачу данных.
Программное обеспечение реализует кодирование видео с использованием кодека X264 – свободной библиотеки для кодирования видеопотоков, реализующей стандарт сжатия H.264, обеспечивающей как высокое качество, так и высокий коэффициент сжатия видео.
Обработка данных
Для обработки данных об объектах транспортной инфраструктуры разработаны алгоритм вычисления радиусов закруглений автомобильной дороги и алгоритм вычисления расстояния видимости.
Алгоритм вычисления радиусов закруглений автомобильной дороги состоит из следующих шагов:
Шаг 1. Получить точку H, в которой траектория движения отклоняется от прямой – точку начала закругления (рисунок 1);
Шаг 2. Получить точку K окончания поворота;
Шаг 3. Построить прямую НB, касательную к траектории в точке начала закругления;
Шаг 4. Построить прямую BK, касательную к траектории в точке окончания закругления;
Шаг 5. Если прямые HB и BK пересекаются, найти их точку пересечения (точка B);
Шаг 6. Вычислить угол между прямыми HB и BK (угол α);
Шаг 7. Вычислить расстояние T от точки начала закругления до точки пересечения прямых HB и BK;
Шаг 8.
Вычислить радиус закругления ![]() .
.
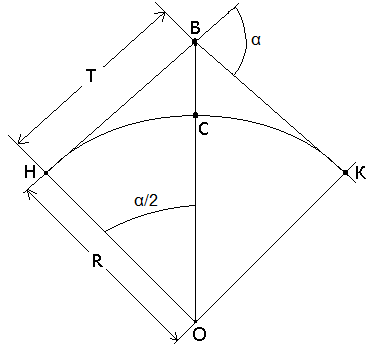
Рис. 1. Вычисление радиусов закруглений дороги
Алгоритм вычисления расстояния видимости состоит из следующих шагов:
Шаг 1. Выбрать начальную точку O траектории движения. В этой точке на высоте 1,2 м над поверхностью дороги находится наблюдатель. Расстояние от начала дороги до точки O равно m (рисунок 2);
Шаг 2. Выбрать точку A траектории после точки, в которой находится наблюдатель. В этой точке на высоте 0,2 м находится объект наблюдения. Расстояние от начала дороги до точки A равно m1;
Шаг 3. Построить прямую OA;
Шаг 4. Если прямая OA не пересекает траекторию движения, то переместить объект наблюдения в следующую точку траектории и перейти к шагу 3;
Шаг 5. Если прямая пересекает траекторию движения, т.е. объект наблюдения находится в точке C, на расстоянии m3 от начала дороги, то данная итерация алгоритма завершена, расстояние видимости в точке O равно расстоянию между точкой O и последней видимой точкой B, т.е. m2 – m. Переместить наблюдателя в точку, следующую за точкой O и перейти к шагу 2;
Шаг 6. Если расстояние от точки O до точки, в которой находится объект наблюдения равно максимальной видимости, то данная итерация алгоритма завершена, расстояние видимости в точке O равно максимальной видимости. Переместить наблюдателя в точку, следующую за точкой O и перейти к шагу 2;
Шаг 7. Если наблюдатель находится в конечной точке траектории, алгоритм завершен.
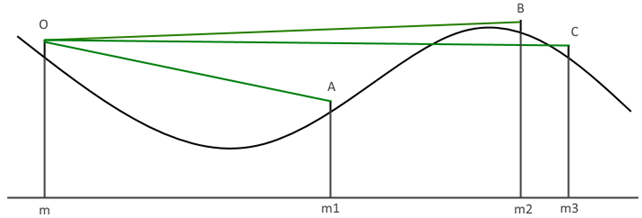
Рис. 2. Вычисление расстояния видимости
Описанные выше алгоритмы реализованы в системе учета геометрических параметров проезжей части [2], которая, согласно разработанному методу, применяется при проведении камеральных работ и обеспечивает:
· вычисление радиусов закруглений дороги и отображение графика радиусов закруглений (рисунок 3);
· отображение графика высот;
· вычисление уклонов дороги и отображение диаграммы уклонов;
· вычисление расстояния видимости и отображение графика видимости;
· учет технических средств организации дорожного движения (ТСОДД);
· формирование сводных ведомостей размещения ТСОДД;
· измерение линейных и площадных геометрических параметров объектов транспортной инфраструктуры по кадру видеозаписи (рисунок 4).
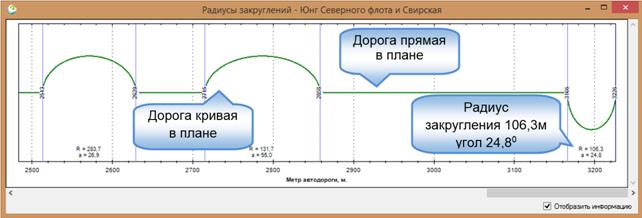
Рис. 3. График радиусов закруглений дороги
Использование данных
Система учета геометрических параметров проезжей части позволяет добавлять, удалять и редактировать информацию в базе данных геоинформационной системы ITSGIS [6] о следующих объектах транспортной инфраструктуры:
· дорожные знаки;
· дорожная разметка;
· направляющие устройства (сигнальные столбики);
· пешеходные дорожки (тротуары);
· дорожные ограждения;
· остановки общественного транспорта;
· светофоры;
· искусственное освещение.

Рис. 4. Измерение высоты опоры знака по видеокадру
Каждый объект в базе данных хранит информацию о местоположении во всемирной геодезической системе координат (WGS-84) и линейный адрес относительно начала дороги в формате (км+м) [4].
Система позволяет автоматически формировать проекты ОДД в формате обмена изображениями (DXF), который разработан компанией Autodesk [1].
Проект ОДД включает в себя контуры автомобильной дороги, диаграмму продольных уклонов, график кривых в плане, линии дорожной разметки, дорожные знаки, дорожные ограждения, пешеходные ограждения, направляющие устройства, светофоры, освещение, остановки общественного транспорта, железнодорожные переезды, искусственные сооружения [7].
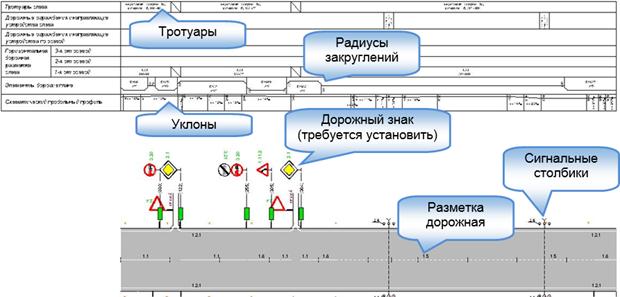
Рис. 5. Проект организации дорожного движения
Заключение
Применение разработанного метода и алгоритмов экспертизы объектов транспортной инфраструктуры позволило автоматизировать процесс сбора, обработки и использования информации, уменьшить нагрузку на специалистов отдела ОДД, сократить трудоемкость и повысить качество разработки проектов ОДД.
Разработанный метод и алгоритмы экспертизы объектов транспортной инфраструктуры реализованы в программно-аппаратном комплексе исследования автомобильных дорог, инвентаризации и паспортизации, который обеспечивает:
· запись видео с IP-камер;
· запись GPS-данных;
· хранение информации об установленных ТСОДД;
· вычисление радиусов закруглений автомобильной дороги;
· вычисление продольных уклонов дороги;
· вычисление расстояния видимости;
· измерение линейных и площадных геометрических параметров объектов транспортной инфраструктуры по кадру видеозаписи;
· формирование сводных ведомостей размещения ТСОДД;
· формирование проектов ОДД.
Рецензенты:Прохоров С.А., д.т.н., профессор, заведующий кафедрой информационных систем и технологий, Самарский государственный аэрокосмический университет имени академика С.П. Королева (национальный исследовательский университет), г.Самара.
Хайтбаев В.А., д.э.н., профессор кафедры организации и управления перевозками на транспорте, Самарский государственный аэрокосмический университет имени академика С.П. Королева (национальный исследовательский университет), г.Самара.