


Scientific journal
Modern problems of science and education
ISSN 2070-7428
"Перечень" ВАК
ИФ РИНЦ = 0,936
IMAGE CLASSIFICATION USING SEGMENTATION ALGORITHMS

На протяжении последних десятилетий задаче поиска объектов на изображении уделяется большое внимание из-за того, что это позволяет производить обнаружение и классификацию объектов. На данный момент выполнено огромное количество исследований и опубликовано большое количество работ, однако, с нашей точки зрения, данная область остаётся ещё не просто не до конца изученной, а всего лишь слегка тронутой исследователями.
Методы распознавания лиц Виолы Джонса и Майкла Джонса [4], [5] до сих пор являются основными в распознавании не только лиц, но и изображений в целом. В основу их методов положен метод скользящего окна, который используется во всех бюджетных фотоаппаратах для выделения лиц.
На данный момент компьютерное зрение – это технология, позволяющая создавать информационные системы, имеющие навыки обнаружения, слежения и классификации объектов. Основная цель, стоящая перед этой технологией, – построение программного обеспечения, способного понимать, что присутствует на изображении.
Объект исследования
Для решения задачи машинного обучения бинарной классификации используется подход, называемый «мешок слов» [2]. Исходными данными для этого алгоритма выступают изображения, которые делятся на три категории:
· изображения, содержащие искомые объекты;
· изображения, не содержащие искомых объектов;
· проверочная выборка изображений.
Первым шагом алгоритма (рис.1) выступает поиск ключевых точек изображения. Затем вычисляются дескрипторы ключевых точек. В работе используются дескрипторы SIFT и SURF.
Далее выполняется обучение словаря. Признаки разбиваются на группы с помощью алгоритмов кластеризации. Результатом работы алгоритма кластеризации является словарь (центры кластеров).
После этого выполняется построение признакового описания изображений. Далее выполняется поиск ключевых точек и нахождение дескрипторов. Для каждого дескриптора выполняется поиск ближайшего центра кластера. На основе вычисленных дескрипторов формируем «мешок слов», т.е. частоту встречаемости определенных групп дескрипторов на изображении. Слово в данном случае – это часто повторяющиеся фрагменты изображения.
В качестве последнего шага выступает алгоритм машинного обучения, который использует классификаторы. В данной работе было использовано восемь классификаторов [1]: SVM, DTree, RTree, ERTree, GBTtree, Boost, Bayes, KNearest.
Недостатком алгоритма является то, что для классификации используются все ключевые точки изображения. Это означает, что для обучения используются точки, которые объекту не принадлежат.
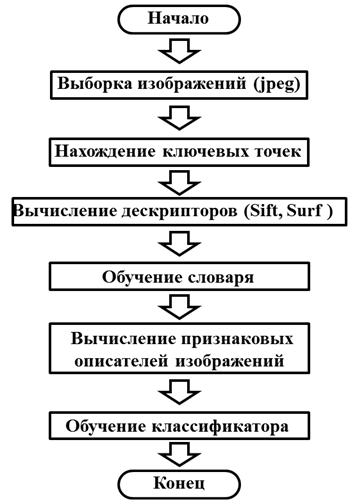
Рис. 1. Схема алгоритма машинного обучения бинарной классификации
Было предложено в алгоритм добавить шаг сегментации объекта и шаг фильтрации (рис. 2). Для этого были использованы алгоритмы сегментации [3] Watershed, GrabCut. Алгоритмы сегментации служат для выделения двух сегментов, один из них относится к объекту, другой к области, на которой ошибочно находятся ключевые точки.
Целью шага фильтрации станет фильтрация точек, которые не принадлежат объекту. Это позволит сократить процент ошибок при поиске объектов. На первой стадии алгоритма фильтрации выполняется ручная сегментация изображения, т.е. будут выделены объект и фон изображения. Вторая стадия включает в себя создание текстового файла, который будет содержать матрицу, размер которой будет равен размеру изображения, и каждый элемент будет являться точкой изображения (0 или 1). Ноль – это точка, которая принадлежит объекту. Единица – это точка, которая принадлежит фону. На основании этих данных будут фильтроваться ключевые точки.
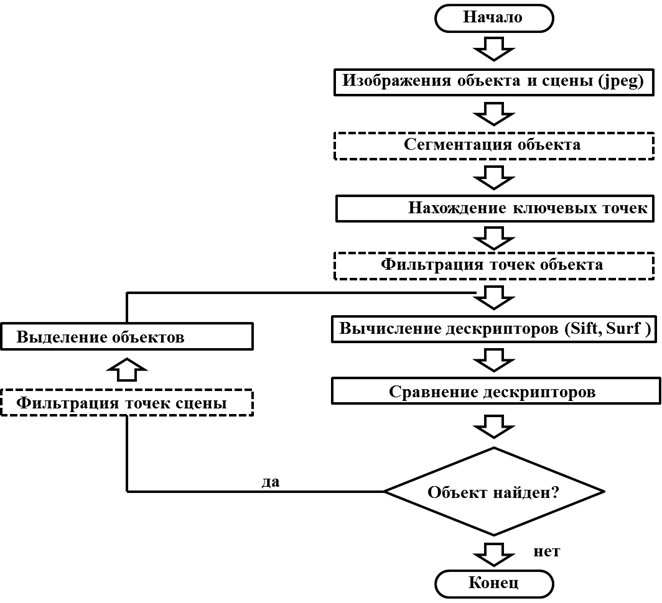
Рис. 2. Схема модифицированного алгоритма машинного обучения
На шаге фильтрации точек объекта будет выполняться считывание матрицы из текстового файла. Каждая ключевая точка имеет координату, предполагается считывать координату этой точки и сравнивать ее с значением из матрицы. Если ключевая точка принадлежит фону, то она удаляется из массива ключевых точек. Если координата ключевой точки совпадает с точкой объекта, то сохраняется в массиве ключевых точек.
На шаге фильтрации точек сцены выполняется удаление ключевых точек сцены, которые принадлежали найденному объекту. Что позволяет находить похожие объекты на сцене.
Предложенный алгоритм реализован с использованием библиотеки компьютерного зрения OpenCV. В ходе эксперимента был протестирован процент ошибочно классифицированных изображений с использованием оригинального алгоритма и алгоритма с модификацией. На рисунке 3 представлены результаты моделирования с использованием дескрипторов SURF.
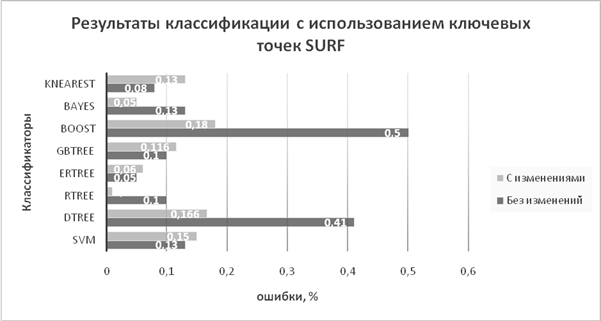
Рис. 3. Сравнительные результаты классификации с использованием ключевых точек SURF
При сравнении данных для модифицированного и оригинального алгоритмов видно, что фильтрация точек улучшила процент верно классифицированных изображений, т.е. процент ошибки уменьшился для классификаторов DTree, RTree, Boost, Bayes.
Результаты DTree улучшились с 41 % до 16.6 %. В количественном соотношении – это 250 и 100 изображений. Фильтрация, которая была предложена для модификации алгоритма, уменьшила процент ошибок на 24.4 %, т.е. 150 изображений были верно классифицированы с использованием модификации. Эти результаты показывают, что классификатор DTree чувствителен к зашумленным данным и отсеивание шума помогает улучшить результаты его работы.
Результаты RTree также улучшились с 10 % до 1.6 %. В количественном соотношении – это 60 и 10 изображений. Таким образом, фильтрация точек помогла улучшить результаты классификатора на 8.4 % или на 50 изображений. Классификатор RTree оказался менее чувствителен к данным, чем DTree.
Результаты классификатора Boost с типом бустинга REAL улучшились с 50 % до 18 %. В количественном соотношении – это 300 и 110 изображений. Это самое значительное из восьми классификаторов улучшение, полученное с использованием фильтрации. Результаты показывают, что тип бустинга REAL очень плохо работал с данными, которые не были отфильтрованы.
Результаты Bayes также улучшились с 13 % до 5 %. В количественном сотношении – это 80 и 30 изображений. Получили, что фильтрация точек помогла улучшить результаты классификатора на 8 % или на 50 изображений.
При работе алгоритма было отфильтровано 12 % ключевых точек, что позволило значительно уменьшить процент ошибок для классификаторов типа Boost и DTree.
На рисунке 4 приведены данные для классификаторов
SVM и Boost. 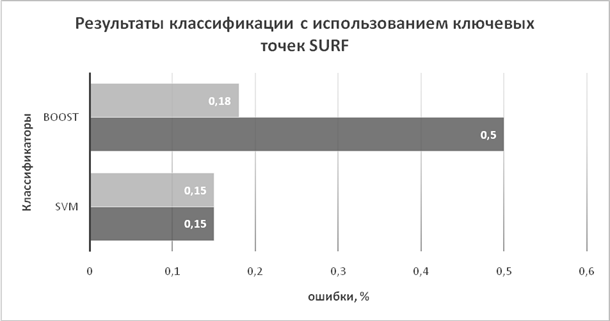
Рис. 4. Сравнительные результаты классификации с использованием ключевых точек SURF
Тип бустинга DISCRETE не приведен, т.к. процент ошибок не изменился при модификации алгоритма и составляет 3 %. Из этого можно сделать вывод, что данный тип бустинга хорошо работает с данными, которые не отфильтрованы. SVM классификатор с модификацией, как видно из рисунка 4, не изменил процент ошибок и составляет 15 %.
Заключение
В работе была выполнена реализация подхода «мешок слов». Добавлена модификация алгоритма с использованием алгоритма сегментации изображений Watershed.
В данной работе были исследованы алгоритмы классификации, а также, совместно с ними, алгоритмы сегментации изображений. При детальном изучении классификаторов выяснилось, что некоторые классификаторы: DTree (с ключевыми точками SURF) и Boost (для SIFT, SURF) с типом бустинга REAL, чувствительны к данным, которые используются при обучении. Использование фильтрации точек помогло уменьшить процент ошибок данных классификаторов на 20–30 %.
Рецензенты:Андреев В.В., д.т.н., профессор кафедры «Ядерные реакторы и энергетические установки», ФГБОУ ВПО «Нижегородский государственный технический университет им. Р.Е. Алексеева», г. Нижний Новгород.
Рындык А.Г., д.т.н., профессор, профессор кафедры «Информационные радиосистемы», ФГБОУ ВПО «Нижегородский государственный технический университет им. Р.Е. Алексеева», г. Нижний Новгород.
Библиографическая ссылка
Дмитриев Д.В., Капранов С.Н. ПРИМЕНЕНИЕ АЛГОРИТМОВ СЕГМЕНТАЦИИ ДЛЯ КЛАССИФИКАЦИИ ИЗОБРАЖЕНИЙ // Современные проблемы науки и образования. 2014. № 6. ;URL: https://science-education.ru/en/article/view?id=16490 (дата обращения: 20.07.2026).