



Принцип обоснования минимально допустимого расстояния видимости дорожной разметки и дорожных знаков как объектов дорожной обстановки является одним из действенных способов повышения безопасности.
Теоретический анализ. Зрительное восприятие объектов дорожной обстановки представляет собой ряд последовательных этапов: обнаружение объекта, его различение, опознание (идентификация) и декодирование.
Обнаружение объекта – это этап зрительного процесса, в котором наблюдатель выделяет в поле зрения объект, но ещё не может судить о его форме или каких-либо других признаках. На этапе различения водитель определяет форму детали объекта, на основании которых и происходит его опознание.
Наиболее общей характеристикой объекта, зависящей от его физических свойств, размеров и формы является его видимость. Видимость объекта в инженерной психологии принято оценивать угловыми величинами. Однако при эксплуатации объектов дорожной обстановки, к числу которых относится транспортные ограждения и сигнальные столбики, удобнее оценивать их видимость расстоянием, на котором наблюдатель может с достаточной достоверностью обнаружить и различить объект [5,6].
Это расстояние может быть определено при решении зрительной задачи, представленной на рисунке 1. Как видно из рисунка 1 расстояние видимости объекта наблюдателем при условии параллельности его взгляда, поверхности дороги определяется выражением
 . (1)
. (1)
Анализ формулы (1) показывает, что для определения минимально допустимого расстояния видимости объекта необходимо знать две основные величины, характеризующие его геометрические параметры: минимальный размер объекта по высоте или ширине ![]() (м) и порог обнаружения и различия объекта
(м) и порог обнаружения и различия объекта ![]() , угловые минуты.
, угловые минуты.
По данным ранее проведённых исследований величина для оценки расстояния видимости транспортных ограждений и сигнальных столбиков может быть принята 3 угловым минутам.
Учитывая, что диаметр металлических опор транспортных ограждений и сигнальных столбиков в среднем 0,12 м, минимально допустимое расстояние их видимости, рассчитанное по формуле (1) составляет 150 м [1-3,4].
Указанное расстояние должно использоваться как нормативное при оценке транспортно-эксплуатационных качеств объектов.
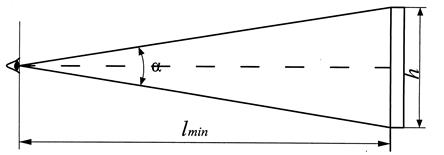
Рис. 1. Схема зрительной задачи при определении расстояния видимости объекта дорожной обстановки
При оценке расстояния видимости объектов в реальных условиях наблюдения величина отклоненных результатов от нормативного значения не должна составлять более 5 %.
Методика. Основная задача, решаемая установкой дорожных знаков, состоит в обеспечении зрительной ориентации водителей в сложных условиях.
Однако при решении зрительной задачи необходимо отметить, что восприятие объектов дорожной обстановки должно характеризоваться угловым порогом их опознания, то есть этапом переработки зрительной информации [7-8].
В этой связи угловой порог опознания объектов дорожной обстановки при стационарном наблюдении может быть принят в угловых минутах.
Согласно ГОСТ 10807-78 дорожные знаки на автомобильных дорогах соответствуют 4 типоразмерам (таблица 1).
Таблица 1
Дорожные знаки
|
Типоразмер знака |
Вне населенных пунктов |
В населённых пунктах |
|
I |
1 полоса |
местного значения |
|
II |
С 2 и 3 полосами |
магистральные |
|
III |
С 4 и более полосами и автомагистрали |
скоростные |
|
IV |
Ремонтные работы на автомагистралях, опасные участки при обосновании целесообразности применения |
|
Следует отметить, что обоснование минимально-допустимого расстояния видимости объектов дорожной обстановки предусматривает стационарное (неподвижное) наблюдение, которое не учитывает специфических особенностей зрительного восприятия, характерных для движения автопоезда.
Применение метода стационарного наблюдения обусловлено рядом факторов, унификация которых в настоящее время не предоставляется возможной. К числу этих факторов следует отнести: тип автопоезда, жёсткость амортизаторов и подвески автомобиля, скорость движения, опыт и производственный стаж водителя – наблюдателя и ряд других.
Необходимая величина расчётного расстояния видимости дорожных объектов определяется расчётной скоростью движения принятой схемой видимости.
До настоящего времени нормативными документами не регламентируется минимальное допустимое расстояние видимости дорожной разметки. Не существует достаточно обоснованных рекомендаций по этому вопросу [3-5].
Одной из задач настоящего исследования является обоснование минимального необходимого расстояния видимости дорожной разметки с учётом её специфического назначения.
Основными препятствиями в схемах видимости дорожной разметки, учитывая её назначение обеспечивать оптическую ориентацию водителя при выборе траектории движения, преимущественно в тёмное время суток, могут быть: изменение направления дороги в плане, человек или предмет на проезжей части и повреждение или разрушение проезжей части [7-10].
В соответствии с этими обстоятельствами для назначения расчётной дальности видимости будем руководствоваться основными схемами, представленными на рисунке 2. Схема 1 приемлема для дорог с размеченными полосами движения, когда выезд на соседнюю полосу невозможен по условиям интенсивности движения. Для обеспечения видимости в этом случае решающую роль для тёмного времени суток играет характер препятствия, то есть его геометрические размеры и светотехнические характеристики. Очевидно, что наиболее трудным случаем будет являться видимость повреждения проезжей части.
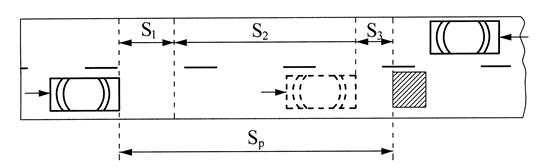
Схема 1
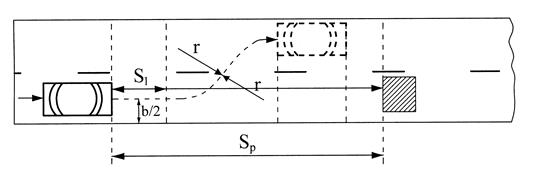
Схема 2
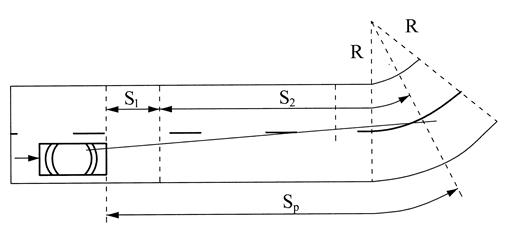
Схема 3
Рис. 2. Расчётные схемы для определения необходимой дальности видимости дорожной разметки
Схема 2 возможна при малой интенсивности движения, характерной для тёмного времени суток. Схема 3 возможна при движении по незнакомой дороге с недостаточным количеством объектов оптического ориентирования.
Для схемы 1 расчётная видимость дорожной разметки
 . (2)
. (2)
Для схемы 2 расстояние объезда ![]() состоит из двух одинаковых обратных кривых, которые водитель должен возможно более плавно описать радиусом
состоит из двух одинаковых обратных кривых, которые водитель должен возможно более плавно описать радиусом ![]() без допущения бокового скольжения.
без допущения бокового скольжения.
Ввиду малости величины ![]() по отношению к
по отношению к ![]() и
и ![]() с достаточной степенью точности длину каждой из кривых можно принять равной
с достаточной степенью точности длину каждой из кривых можно принять равной ![]() . Тогда из подобия треугольников
. Тогда из подобия треугольников
![]() и
и ![]() . (3)
. (3)
Приняв, что траектория автомобиля при объезде препятствия соответствует двум дугам окружности постоянного радиуса, расчётное расстояние видимости дорожной разметки запишется:
 . (4)
. (4)
Для схемы 3 путь, проходимый автомобилем за время снижения скорости с ![]() до
до ![]() :
:
 , (5)
, (5)
где ![]() - отрицательное ускорение, м/с2;
- отрицательное ускорение, м/с2; ![]() - безопасная скорость движения на кривой, км/ч, принимается как расчётная скорость, допустимая на трудных участках.
- безопасная скорость движения на кривой, км/ч, принимается как расчётная скорость, допустимая на трудных участках.
По данным авторов [4,5] отрицательное ускорение, при котором обеспечивается замедление движения автомобиля с достаточным комфортом для водителя, зависит от скорости движения и выражается зависимостью [6]
![]() . (6)
. (6)
Таким образом, для схемы расчётное расстояние видимости дорожной разметки:
 . (7)
. (7)
Расчётные расстояния видимости дорожной разметки для различных схем сведены в таблице 3. Из таблицы 3 видно, что наиболее приемлемой расчётной схемой для определения расчётного расстояния видимости дорожной разметки является схема 2.
По этой схеме максимальное расчётное расстояние видимости дорожной разметки примерно равно 100 м, что соответствует возможностям осветительных приборов современных автомобилей, обеспечивающих на таком расстоянии расчётный уровень освещенности. Минимальное расстояние видимости по этой схеме вполне удовлетворяет принятому условию обеспечения безопасности движения автомобиля в тёмное время суток.
Таблица 2
Расчётное расстояние видимости дорожной разметки
|
Категория дороги |
На основных участках дорог |
На участках пересеченной местности |
На участках горной местности |
||||||
|
Схема |
Схема |
Схема |
|||||||
|
1 |
2 |
3 |
1 |
2 |
3 |
1 |
2 |
3 |
|
|
I |
112 |
97 |
155 |
79 |
79 |
117 |
45 |
54 |
35 |
|
II |
79 |
79 |
117 |
60 |
68 |
90 |
31 |
42 |
28 |
|
III |
60 |
66 |
90 |
45 |
54 |
65 |
25 |
36 |
23 |
|
IV |
45 |
54 |
65 |
31 |
42 |
34 |
20 |
30 |
19 |
Таким образом, схема 2 может быть рекомендована для определения расчётного расстояния видимости дорожной разметки.
Минимальное расстояние видимости разметки в тёмный период суток должно составлять для дорог по категориям: I-100 м; II – 80 м; III – 65 м; IV – 55 м. Метод оценки видимости дорожных знаков должен быть общедоступен и прост. В связи с этими требованиями в качестве основного стационарного метода определения расстояния видимости дорожных знаков может быть рассмотрен визуальный метод без применения специальных приборов. Однако визуальное наблюдение диктует необходимость введения ограничения: наблюдатель должен обладать нормативным зрением.
Методика оценки видимости дорожных знаков должна предусматривать условия и последовательность проведения работ. При этом под условиями проведения работ следует понимать время суток и условия естественной освещенности объекта. Наиболее соответствующим временем является дневное, при ясной погоде. Условия естественной освещенности могут быть назначены после рассмотрения возможных случаев освещения объектов солнечным светом.
Заключительный этап работ предусматривает вынос точки стояния наблюдателя с обочины на полосу отвода. Целью заключительного этапа является сокращение времени производства работ при последующих замерах.
Наблюдения показали, что видимость дорожной разметки всегда обеспечивается в условиях дневного освещения. Кроме того, в дневное время дорожная разметка не является направлением движения, а служит средством, определяющим тактику вождения автомобиля, в частности, размещение автомобиля на проезжей части.
В тёмное время суток горизонтальная дорожная разметка, зачастую, является единственным средством, информирующим водителя об изменении направления трассы дороги. В этом случае горизонтальная (осевая, краевая) дорожная разметка должна быть видимой на возможно большем расстоянии. Однако в тёмное время суток в случае недостаточной световозвращающей способности дорожной разметки, расстояние видимости её оказывается недостаточным.
Следовательно, в качестве контрольного расстояния видимости дорожной разметки должно быть принято расстояние видимости дорожной разметки в тёмное время суток при освещении автомобильными фарами в режиме дальнего света.
Расстояние видимости дорожной разметки можно производить визуально. Для этого в тёмное время суток наблюдатель располагается в кабине автомобиля, стоящего на середине полосы движения с выключенными фарами в режиме дальнего света. Дальность видимости дорожной разметки определяется по следующей формуле:
![]() , (8)
, (8)
где ![]() - средняя длина одного штриха горизонтальной разметки, м;
- средняя длина одного штриха горизонтальной разметки, м; ![]() - среднее расстояние между соседними штрихами, м;
- среднее расстояние между соседними штрихами, м; ![]() - количество штрихов, видимых из автомобиля, шт.
- количество штрихов, видимых из автомобиля, шт.
При измерении расстояния видимости дорожной разметки переднее колесо автомобиля должно располагаться напротив конца штриха дорожной разметки (граница «штрих-разрыв»).
Вывод. Авторами установлено, что наиболее приемлемой расчётной схемой для определения расчётного расстояния видимости дорожной разметки является схема 2. По этой схеме максимальное расчётное расстояние видимости дорожной разметки примерно равно 100 м, что соответствует возможностям осветительных приборов современных автомобилей, обеспечивающих на таком расстоянии расчётный уровень освещенности. Минимальное расстояние видимости по этой схеме вполне удовлетворяет принятому условию обеспечения безопасности движения автомобиля в тёмное время суток. Таким образом, минимальное расстояние видимости разметки в тёмный период суток должно составлять для дорог по категориям: I-100 м; II – 80 м; III – 65 м; IV – 55 м.
Рецензенты:
Яковлев К.А., д.т.н., доцент кафедры производства, ремонта и эксплуатации машин ФГБОУ ВПО «Воронежская государственная лесотехническая академия», г. Воронеж;
Волков В.С., д.т.н., профессор, заведующий кафедрой автомобилей и сервиса ФГБОУ ВПО «Воронежская государственная лесотехническая академия», г. Воронеж.