


Scientific journal
Modern problems of science and education
ISSN 2070-7428
"Перечень" ВАК
ИФ РИНЦ = 0,936
EQUATIONS OF DYNAMICS AC ELECTROMAGNET

Рассмотрим условную схему некоторого электромагнита (ЭМ) переменного тока (рис.1). Пусть якорь ЭМ массой ![]() под действием электромагнитной силы перемещается в пределах хода якоря
под действием электромагнитной силы перемещается в пределах хода якоря ![]() , где
, где ![]() – начальный рабочий зазор,
– начальный рабочий зазор, ![]() – конечный рабочий зазор [1,3,8]. Направление отсчета перемещения якоря выберем в сторону уменьшения рабочего зазора
– конечный рабочий зазор [1,3,8]. Направление отсчета перемещения якоря выберем в сторону уменьшения рабочего зазора ![]() , тогда перемещение якоря будет
, тогда перемещение якоря будет ![]() .
.
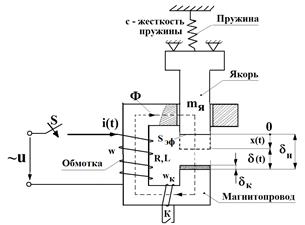
Рис. 1. Условная схема ЭМ при включении на переменное напряжение
В схеме приняты следующие условные обозначения:
S – ключ в цепи обмотки намагничивания;
![]() – ключ в цепи обмотки с короткозамкнутыми
– ключ в цепи обмотки с короткозамкнутыми ![]() витками;
витками;
![]() – переменное синусоидальное напряжение;
– переменное синусоидальное напряжение;
![]() – ток в обмотке;
– ток в обмотке;
![]() – текущий (изменяющийся во времени) рабочий воздушный зазор;
– текущий (изменяющийся во времени) рабочий воздушный зазор;
![]() – ход якоря, определяемый от фиксированной точки отсчета 0;
– ход якоря, определяемый от фиксированной точки отсчета 0;
![]() – переменный магнитный поток;
– переменный магнитный поток;
R, L – активное сопротивление и индуктивность катушки ЭМ;
![]() эффективная площадь поперечного сечения шихтованного магнитопровода (с учетом коэффициента заполнения сталью);
эффективная площадь поперечного сечения шихтованного магнитопровода (с учетом коэффициента заполнения сталью);
![]() – масса якоря;
– масса якоря;
![]() – число витков обмотки ЭМ.
– число витков обмотки ЭМ.
При замыкании ключа ![]() (рис. 1) на обмотку ЭМ подается переменное синусоидальное напряжение источника питания. В электрической цепи обмотки, расположенной на шихтованном стальном сердечнике, возникнет переходный процесс, который описывается дифференциальным уравнением электрического равновесия (1) и алгебраическим уравнением состояния магнитной цепи (2), входящих в систему для совместного решения [4]:
(рис. 1) на обмотку ЭМ подается переменное синусоидальное напряжение источника питания. В электрической цепи обмотки, расположенной на шихтованном стальном сердечнике, возникнет переходный процесс, который описывается дифференциальным уравнением электрического равновесия (1) и алгебраическим уравнением состояния магнитной цепи (2), входящих в систему для совместного решения [4]:

где ![]() потокосцепление обмотки, зависящее от тока и перемещения якоря;
потокосцепление обмотки, зависящее от тока и перемещения якоря;
![]() напряжения источника питания;
напряжения источника питания;
![]() амплитуда напряжения;
амплитуда напряжения;
![]() начальная фаза;
начальная фаза;
![]() угловая частота;
угловая частота;
![]() частота.
частота.
Уравнение (2) представляет собой в общем случае нелинейные характеристики ![]() , зависящие от рабочего зазора
, зависящие от рабочего зазора ![]() , а значит, от координаты
, а значит, от координаты ![]() , определяющей перемещение якоря [2]. Графически эти характеристики изображаются семейством кривых
, определяющей перемещение якоря [2]. Графически эти характеристики изображаются семейством кривых ![]() , построенных для различных мгновенных значений потокосцепления и тока при фиксированных значениях переменной
, построенных для различных мгновенных значений потокосцепления и тока при фиксированных значениях переменной ![]() в области определения
в области определения ![]() , причём при больших рабочих зазорах в начале хода якоря зависимость
, причём при больших рабочих зазорах в начале хода якоря зависимость ![]() сравнительно пологая, а при малых зазорах в конце хода якоря – более крутая (рис. 2).
сравнительно пологая, а при малых зазорах в конце хода якоря – более крутая (рис. 2).
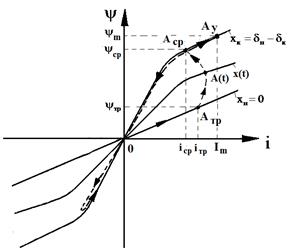
Рис. 2. Зависимость ![]() при различных значениях перемещения в пределах хода якоря
при различных значениях перемещения в пределах хода якоря ![]()
При переходном процессе ток в обмотке ЭМ изменяется по сложному закону [3, 5, 6], о чём можно судить по перемещению рабочей точки A состояния магнитной цепи электромагнита на графике (рис. 2) в направлении, указанном стрелками, очерчивая путь
![]() . (3)
. (3)
где ![]() точка отсчета времени переходного процесса, соответствующая начальным условиям, то есть мгновенные значения тока и напряжений на участках электрической цепи в момент замыкания ключа S;
точка отсчета времени переходного процесса, соответствующая начальным условиям, то есть мгновенные значения тока и напряжений на участках электрической цепи в момент замыкания ключа S;
![]() точка, при которой ток достигает значения тока трогания за промежуток времени с момента подачи напряжения на обмотку до момента начала движения якоря, называемый время трогания
точка, при которой ток достигает значения тока трогания за промежуток времени с момента подачи напряжения на обмотку до момента начала движения якоря, называемый время трогания![]() ;
;
![]() точка, соответствующая текущим изменяющимся во времени значениям тока и потокосцепления обмотки при движении якоря;
точка, соответствующая текущим изменяющимся во времени значениям тока и потокосцепления обмотки при движении якоря;
![]() точка, определяющая значения тока и потокосцепления обмотки спустя промежуток времени с момента подачи напряжения на обмотку до момента остановки якоря, называемый временем срабатывания;
точка, определяющая значения тока и потокосцепления обмотки спустя промежуток времени с момента подачи напряжения на обмотку до момента остановки якоря, называемый временем срабатывания;
![]() точка, характеризующая окончание переходного процесса в конце хода якоря и определяющая установившиеся (амплитудные) значения тока и потокосцепления обмотки.
точка, характеризующая окончание переходного процесса в конце хода якоря и определяющая установившиеся (амплитудные) значения тока и потокосцепления обмотки.
Динамическая характеристика контактора переменного тока, показанная на рис. 2, выделена пунктирной линией и соответствует достижению положительного значения тока трогания, при котором перемещение якоря из начального в конечное положение происходит в положительный полупериод синусоидально изменяющегося напряжения на обмотке контактора, когда его начальная фаза равна нулю. При изменении начальной фазы напряжения на обмотке контактора возможен случай, когда ток трогания принимает отрицательное значение, тогда перемещение якоря из начального в конечное положение будет происходить при отрицательных значениях тока и потокосцепления. Для этого случая динамическую характеристику контактора переменного тока, показанную на рис. 2, следует изобразить повернутой на угол 180 электрических градусов [6,7].
Из уравнения электрического равновесия (1), справедливого для каждого положения якоря в интервале ![]() , нетрудно получить уравнение баланса энергии, учитывающего особенности преобразования электромагнитной энергии в разных частях ЭМ при движении якоря. С этой целью умножим обе части уравнения (1) на произведение
, нетрудно получить уравнение баланса энергии, учитывающего особенности преобразования электромагнитной энергии в разных частях ЭМ при движении якоря. С этой целью умножим обе части уравнения (1) на произведение ![]() , тогда получим:
, тогда получим:
![]() , (4)
, (4)
где ![]() – электрическая энергия источника питания;
– электрическая энергия источника питания;
![]() энергия, расходуемая на нагрев обмоточного провода и рассеиваемая в окружающую среду;
энергия, расходуемая на нагрев обмоточного провода и рассеиваемая в окружающую среду;
![]() энергия, передаваемая в магнитную систему ЭМ магнитным полем.
энергия, передаваемая в магнитную систему ЭМ магнитным полем.
Очевидно, что последнее слагаемое в правой части уравнения (4) определяет суммарную энергию, затрачиваемую на движение якоря и изменение энергии магнитного поля, поэтому можно записать
![]() , (5)
, (5)
где ![]() – электромагнитная сила, действующая на якорь;
– электромагнитная сила, действующая на якорь;
![]() – изменение энергии магнитного поля;
– изменение энергии магнитного поля;
![]() – механическая работа по перемещению якоря.
– механическая работа по перемещению якоря.
С учетом равенства энергий (5) уравнение баланса энергии (4) принимает вид:
![]() . (6)
. (6)
Равенство энергий (5) можно рассматривать как уравнение для определения электромагнитной силы ![]() . Действительно, зная выражение энергии магнитного поля
. Действительно, зная выражение энергии магнитного поля
![]() , (7)
, (7)
найдем изменение энергии магнитного поля за время ![]() , вычислив ее дифференциал
, вычислив ее дифференциал
![]() . (8)
. (8)
Подстановка выражения (8) в уравнение (5) даёт
![]() , (9)
, (9)
откуда выразим
![]() . (10)
. (10)
В выражении (10) потокосцепление ![]() – это сложная функция двух независимых переменных, поэтому ее дифференциал вычисляется через частные производные по току
– это сложная функция двух независимых переменных, поэтому ее дифференциал вычисляется через частные производные по току ![]() и перемещению якоря
и перемещению якоря ![]() , а именно:
, а именно:
![]() . (11)
. (11)
После подстановки этого выражения в уравнение (10) получим:
![]() . (12)
. (12)
Выражение (12) дает возможность определить электромагнитную силу для насыщенной и ненасыщенной магнитных систем ЭМ.
В частности, если магнитная система ЭМ насыщена, то
при ![]()
![]() ; (13)
; (13)
при ![]()
![]() . (14)
. (14)
В общем случае, когда ток ![]() и потокосцепление катушки
и потокосцепление катушки ![]() , электромагнитную силу следует определять по выражению (12).
, электромагнитную силу следует определять по выражению (12).
Для ненасыщенной магнитной системы ЭМ можно записать:
![]() , (15)
, (15)
где ![]() – индуктивность обмотки ЭМ, определяющая угол наклона прямых
– индуктивность обмотки ЭМ, определяющая угол наклона прямых ![]() при различных значениях перемещений якоря
при различных значениях перемещений якоря ![]() .
.
Найдем частные производные, используя выражение (15)
![]() ; (16)
; (16)
![]() . (17)
. (17)
Выполнив подстановку (16) и (17) в выражение электромагнитной силы (12), получим
![]() . (18)
. (18)
Два слагаемых, помещенные в скобки, в этом выражении компенсируют друг друга, поэтому в окончательном виде формула электромагнитной силы для ненасыщенной магнитной системы ЭМ имеет вид:
![]() . (19)
. (19)
Данное выражение электромагнитной силы широко используется в практике проектирования электромагнитов различного назначения.
Выразим индуктивность обмотки ЭМ через рабочее значение тока, при котором насыщение стального сердечника не наступает, тогда согласно (15) можно записать
![]() . (20)
. (20)
Пренебрегая выпучиванием магнитного потока в зоне рабочего воздушного зазора и малым магнитным сопротивлением магнитопровода (при отсутствии насыщения стали) из расчёта магнитной цепи применительно к клапанному электромагниту с двумя рабочими зазорами, найдем напряженность магнитного поля в рабочем зазоре и индукцию магнитного поля:
![]() ,
, ![]() , (21)
, (21)
где ![]() – напряженность магнитного поля в рабочем зазоре;
– напряженность магнитного поля в рабочем зазоре;
![]() – индукция магнитного поля в стальном сердечнике и рабочем зазоре.
– индукция магнитного поля в стальном сердечнике и рабочем зазоре.
При этом магнитный поток в рабочем зазоре и потокосцепление катушки будут:
![]() , (22)
, (22)
![]() . (23)
. (23)
Индуктивность обмотки от хода якоря
![]() . (24)
. (24)
При перемещении якоря ![]() начальное значение индуктивности обмотки
начальное значение индуктивности обмотки
![]() , (25)
, (25)
откуда ![]() и тогда индуктивность
и тогда индуктивность
![]() , (26)
, (26)
и инверсная индуктивность (величина обратная индуктивности) катушки ЭМ
![]() , (27)
, (27)
где ![]() ,
, ![]() – коэффициенты полинома первого порядка.
– коэффициенты полинома первого порядка.
Очевидно, что зависимость инверсной индуктивности обмотки от перемещения якоря ![]() при отсутствии насыщения магнитной цепи ЭМ и учете выпучивания магнитного потока в рабочем зазоре
при отсутствии насыщения магнитной цепи ЭМ и учете выпучивания магнитного потока в рабочем зазоре ![]() будет мало отличаться от прямой линии на большей части хода якоря, однако ее наклон и коэффициенты аппроксимирующего полинома
будет мало отличаться от прямой линии на большей части хода якоря, однако ее наклон и коэффициенты аппроксимирующего полинома ![]() существенно изменятся. Для их определения можно применить следующую схему расчета:
существенно изменятся. Для их определения можно применить следующую схему расчета:
-
численным методом с помощью пакета программ для ПК рассчитать магнитное поле ЭМ с учетом истинной геометрии его магнитной системы, характеристик используемых магнитных материалов и заданных граничных условий при выбранном токе
 и фиксированных значениях перемещений якоря, задаваемых в диапазоне
и фиксированных значениях перемещений якоря, задаваемых в диапазоне  ;
;
-
по результатам расчета магнитного поля при фиксированном рабочем зазоре вычислить через потокосцепление или запас энергии магнитного поля индуктивность (инверсную индуктивность) обмотки ЭМ;
-
построить график зависимости
 при выбранном рабочем токе и аппроксимировать его прямой линией, вычислив коэффициенты аппроксимирующего полинома;
при выбранном рабочем токе и аппроксимировать его прямой линией, вычислив коэффициенты аппроксимирующего полинома;
-
сравнить коэффициенты аппроксимации зависимости, полученные на основе численного расчета магнитного поля, с коэффициентами
 , полученными из расчета магнитной цепи ЭМ без учета выпучивания магнитного потока.
, полученными из расчета магнитной цепи ЭМ без учета выпучивания магнитного потока.
Независимо от способа определения коэффициентов ![]() зависимость инверсной индуктивности
зависимость инверсной индуктивности ![]() катушки от перемещения якоря записывается одинаковым образом, а значит, выражение (27) может быть использовано для расчета электромагнитной силы с учетом выпучивания магнитного потока в рабочем зазоре, характеристик используемых магнитных материалов и истинной геометрии магнитной системы ЭМ. Тогда электромагнитная сила будет
катушки от перемещения якоря записывается одинаковым образом, а значит, выражение (27) может быть использовано для расчета электромагнитной силы с учетом выпучивания магнитного потока в рабочем зазоре, характеристик используемых магнитных материалов и истинной геометрии магнитной системы ЭМ. Тогда электромагнитная сила будет
![]() . (28)
. (28)
Для предупреждения ошибки расчета электромагнитной силы при малых значениях рабочего зазора по формуле (28), особенно в конце хода якоря ![]() , используют формулу Максвелла. Если магнитное поле в рабочем зазоре равномерно и полюсы ненасыщенны, то формула Максвелла для расчета силы электромагнитного притяжения (тяги) на один полюс
, используют формулу Максвелла. Если магнитное поле в рабочем зазоре равномерно и полюсы ненасыщенны, то формула Максвелла для расчета силы электромагнитного притяжения (тяги) на один полюс
![]() . (29)
. (29)
Учитывая силы, действующие на якорь, получим следующее уравнение движения якоря, пренебрегая силой трения:
![]() , (30)
, (30)
где ![]() – сила сжатия (растяжения) возвратной пружины;
– сила сжатия (растяжения) возвратной пружины;
![]() – сила начального сжатия (растяжения) возвратной пружины;
– сила начального сжатия (растяжения) возвратной пружины;
![]() – жесткость пружины;
– жесткость пружины; ![]() – скорость якоря;
– скорость якоря;
![]() – вес якоря;
– вес якоря;
![]() – масса подвижных частей, приведенных к якорю;
– масса подвижных частей, приведенных к якорю;
![]() – ускорение свободного падения.
– ускорение свободного падения.
Полная система уравнений, характеризующая изменение тока и движение якоря при переходном процессе, возникающем c момента подачи на катушку ЭМ переменного синусоидального напряжения источника питания, имеет следующий вид:
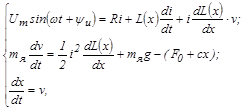 (31)
(31)
где в первом уравнении системы слагаемое![]() .
.
Подставляя в систему уравнений (31) выражение инверсной индуктивности обмотки от хода якоря (27) и приводя систему уравнений к нормальной форме Коши, получим:
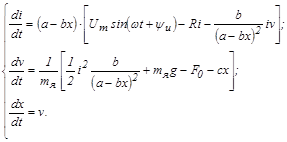 (32)
(32)
Для решения полученной системы уравнений необходимо задаться начальными условиями:
а) до начала движения якоря требуется определить ![]() ,
, ![]() ,
, ![]() ,
, ![]() при следующих начальных условиях (в момент времени
при следующих начальных условиях (в момент времени ![]() )
)
![]() (33)
(33)
б) в процессе движения якоря, когда ![]() и время
и время ![]() , требуется определить
, требуется определить
![]() ;
; ![]() ;
; ![]() ;
; ![]() ;
; ![]() ;
; ![]() ;
; ![]() ;
; ![]() ; время движения якоря
; время движения якоря ![]() при начальных условиях в момент времени
при начальных условиях в момент времени ![]()
![]() (34)
(34)
в) при остановке якоря требуется определить ![]() при начальных условиях в момент времени
при начальных условиях в момент времени ![]()
![]() ,
,![]() . (35)
. (35)
С математической точки зрения данную систему уравнений можно охарактеризовать как линейную систему дифференциальных уравнений с переменными коэффициентами третьего порядка, так как она имеет три независимых переменных состояния (ток![]() , скорость движения якоря
, скорость движения якоря![]() и перемещение якоря
и перемещение якоря![]() ). Для таких систем уравнений общее решение не существует [10]. Их решение может быть получено только численными методами с использованием пакетов прикладных программ для ПК. Однако система уравнений (32) имеет аналитическое решение, но в тех случаях, когда якорь неподвижен, то есть до начала движения якоря при изменении времени
). Для таких систем уравнений общее решение не существует [10]. Их решение может быть получено только численными методами с использованием пакетов прикладных программ для ПК. Однако система уравнений (32) имеет аналитическое решение, но в тех случаях, когда якорь неподвижен, то есть до начала движения якоря при изменении времени ![]() и при его остановке, начиная с момента времени
и при его остановке, начиная с момента времени ![]() .
.
Решение системы дифференциальных уравнений с переменными коэффициентами (32) для расчета динамики ЭМ переменного тока основывается на знании зависимости инверсной индуктивности катушки ![]() от хода якоря, поэтому ее необходимо определить. Однако сложная геометрия магнитной системы ЭМ и переменная величина рабочего зазора, соизмеримая с высотой катушки, существенно затрудняют расчет индуктивности
от хода якоря, поэтому ее необходимо определить. Однако сложная геометрия магнитной системы ЭМ и переменная величина рабочего зазора, соизмеримая с высотой катушки, существенно затрудняют расчет индуктивности ![]() обмотки аналитическими методами, например, метод вероятных путей магнитного потока [2], участков [1,4,8] и др. Их использование не отличается надежностью получаемых результатов при сопоставлении с опытными данными. Поэтому для определения зависимости
обмотки аналитическими методами, например, метод вероятных путей магнитного потока [2], участков [1,4,8] и др. Их использование не отличается надежностью получаемых результатов при сопоставлении с опытными данными. Поэтому для определения зависимости ![]() применяются численные методы расчета магнитных полей.
применяются численные методы расчета магнитных полей.
Рецензенты:
Захаренко В.А., д.т.н., старший научный сотрудник ООО Научно-производственного центра «Термаль», г. Омск;
Федоров В.К., д.т.н., профессор кафедры «Электротехники и электрофикации» Омского государственного аграрного университета им. П.А. Столыпина, г. Омск.
Библиографическая ссылка
Татевосян А.С., Захарова Н.В. УРАВНЕНИЯ ДИНАМИКИ ЭЛЕКТРОМАГНИТА ПЕРЕМЕННОГО ТОКА // Современные проблемы науки и образования. 2014. № 6. ;URL: https://science-education.ru/en/article/view?id=15433 (дата обращения: 18.07.2026).