


Scientific journal
Modern problems of science and education
ISSN 2070-7428
"Перечень" ВАК
ИФ РИНЦ = 0,936
VEHICLE MONITORING SYSTEM WITH THE POSSIBILITY OF DRIVING CONTROL

Введение
Управление транспортным средством это сложная задача, требующая максимальной концентрации от водителя и трезвости принимаемых им решений. Правильное переключение передачи, рациональная тактика управления, глушение двигателя при длительных остановках и прочие события позволяют сократить расходы на топливо примерно от 5% до 15% (цифра расходится в различных источниках, так как для расчета используются различные виды ТС и события во время движения) [1,4,5,7].
В 2009 году Американской Автомобильной Ассоциацией (AAA -American Automobile Association) были проведены исследования, которые показали, что 56% смертельных аварий в период с 2003 по 2007 происходят по причинам небезопасного стиля вождения, который преимущественно связан с агрессивным управлением ТС [2].
Типовая архитектура системы мониторинга
Архитектуру любой современной системы мониторинга ТС, можно представить как несколько функциональных уровней (рис.1).
Уровень объектов мониторинга. На этом уровне происходит сбор информации с датчиков, установленных в ТС (датчики уровня топлива, датчики скорости, данные с GPS/ГЛОНАСС приемника – координаты ТС и другие).
Транспортный уровень. Представляет собой среду для передачи информации от терминального устройства ТС к серверу обработки данных на уровень центральной системы
Уровень центральной системы. Состоит из различных модулей, каждый из которых выполняет свои функции для хранения, передачи и анализа информации, а так же предоставления этой информации в удобном для пользователя виде и генерация отчетов.
Уровень рабочих мест. Представляет собой как организованные для наблюдения за транспортными средствами диспетчерские места, так и административный доступ ко всем настройкам системы, а так же средства для разработчиков.

Рис. 1 Типовая архитектура системы мониторинга
Факторы, влияющие на расход топлива
Факторы движения ТС. Эти факторы связаны с конечной целью поездки и связаны с условиями конкретной задачи, выполняемой ТС: грузоперевозки – передвижение от пункта загрузки до пункта отгрузки; перевозка пассажиров муниципальной службой – регулярные остановки через определенные интервалы; перевозка типа «такси» – движение из одной точки в другую;
Факторы поведения водителя. Эти факторы связаны непосредственно с водителем и, как следствие, с человеческими факторами. Как водитель производит маневры, какие принимает решения (как тормозит, как ускоряется и как переключает передачи), соответственно это будет влиять и на расход топлива.
Факторы качества и типа дороги. Эти факторы связаны с физической природой автомагистралей.
Воздействие на стиль управления ТС через водителя
Существует два типа факторов:
-
Зависимые от водителя факторы, в которых присутствует его выбор и в которых он участвует, принимая решения (выбор пути, выбор стиля выполнения маневра)
-
Независимые, которые не зависят от водителя, от его действий (качество дороги, плотность потока)
Можно сделать вывод, что контролировать независимые факторы не представляется возможным, так как на них никак не получится повлиять, но с другой стороны, на водителя можно как-то воздействовать, например, в современных системах мониторинга, применятся голосовые и визуальные команды от диспетчера.
Регистрация событий при вождении
В качестве устройства регистрации маневров могут использоваться IMU – inertial measurement unit (блок измерения инерции) или motion sensor (сенсор движений).
Самые перспективные IMU построены на базе MEMS - Micro-Electro Mechanical System (Микро Электро-Механические Системы). Пример IMU на базе MEMS приведен на рисунке (рис. 3). IMU устройства малогабаритны и могут быть размещены где угодно, например, в мобильном терминале.

Рис. 2 Направление осей гироскопа и акселерометра в IMU
В первую очередь, необходимо выделить маневры, которые будут зарегистрированы с помощью IMU, а так же составлены шаблоны маневров (наборы сигналов от IMU для каждого маневра), такие как: движение вправо (R), движение влево (L), разворот (U), агрессивное движение вправо (HR), агрессивное движение влево (HL), агрессивный разворот (HU), перестроение направо (SR), перестроение налево (SL).
Для того чтобы определить, начало маневра, используется простая скользящая средняя (SMA): ![]()
Если SMA превышает верхнее пороговое значение ![]() , тогда
, тогда ![]() является началом маневра и маневр продолжается до тех пор, пока SMA не снизится до нижнего порогового значения
является началом маневра и маневр продолжается до тех пор, пока SMA не снизится до нижнего порогового значения ![]() . Если длина маневра превышает заданное максимальное значение (в нашем случае мы рассматриваем значение, равное 15 секунд), то событие забрасывается.
. Если длина маневра превышает заданное максимальное значение (в нашем случае мы рассматриваем значение, равное 15 секунд), то событие забрасывается.
SMA рассчитывается в зависимости от ![]() потому что, вращение проявляется в большей степени, нежели ускорение во всех рассматриваемых событиях. Таким образом, легче зарегистрировать начало и конец любого события в системе контроля качества вождения (Таблица 1).
потому что, вращение проявляется в большей степени, нежели ускорение во всех рассматриваемых событиях. Таким образом, легче зарегистрировать начало и конец любого события в системе контроля качества вождения (Таблица 1).
Таблица 1. Пороговые значения ускорений для показания гироскопа
|
|
Левые/Правые повороты |
Развороты |
Перестроение |
|
Неагрессивные |
0.30g |
0.56g |
Нет |
|
Агрессивные |
0.73g |
0.91g |
0.74g |
Для распознавания конечных маневров ТС используется классический алгоритм DTW для трех наборов сигналов: от акселерометра (A), гироскопа (G) и суммарного сигнала этих двух приборов (T). Система собирает данные движения от акселерометра и гироскопа постоянно, с частотой 25 Гц с целью выявления конкретных маневров.
Идея состоит в том, чтобы с помощью DTW отсеиваются сигналы, которые не удовлетворяют полученному сигналу от IMU затем простым перебором из оставшихся сигналов (заготовленных шаблонов) выбрать оптимальный, наиболее соответствующий полученному маневру и соответственно определить данный маневр.
Результаты эксперимента, проведенного при тестировании системы в реальных условиях в [3] показывают, что при использовании только акселерометра или только гироскопа алгоритму DTW, трудно дифференцировать левый поворот с разворотом. Разворот был правильно определен в 23% случаях только с акселерометром (Таблица 2), и в 46% случаях, используя гироскоп (Таблица 3). Комбинированный набор сигналов от всех датчиков Т (Таблица 4) смог распознать разворот точно в 77% случаях. Данные также показывают, что DTW является допустимым алгоритмом для обнаружения потенциально агрессивных маневров. Почти все (97%) из агрессивных событий были правильно определены с помощью набора датчиков T, доказывая, что такая система является жизнеспособной системой для распознавания стиля вождения и агрессивных маневров. В итоговой таблице (Таблица 5) приведены результаты испытания всех сигналов.
Таблица 2. Распознавание маневров по сигналу акселерометра (А)
|
|
R |
L |
U |
HR |
HL |
HU |
SR |
SL |
|
R |
72 |
0 |
0 |
8 |
0 |
0 |
10 |
10 |
|
L |
1 |
68 |
13 |
0 |
1 |
0 |
4 |
13 |
|
U |
0 |
46 |
23 |
0 |
8 |
23 |
0 |
0 |
|
HR |
29 |
0 |
0 |
71 |
0 |
0 |
0 |
0 |
|
HL |
0 |
0 |
0 |
0 |
100 |
0 |
0 |
0 |
|
HU |
0 |
0 |
0 |
0 |
0 |
100 |
0 |
0 |
|
SR |
0 |
0 |
0 |
0 |
0 |
0 |
100 |
0 |
|
SL |
0 |
17 |
0 |
0 |
0 |
0 |
0 |
83 |
Таблица 3. Распознавание маневров по сигналу гироскопа (G)
|
|
R |
L |
U |
HR |
HL |
HU |
SR |
SL |
|
R |
76 |
0 |
0 |
19 |
1 |
0 |
3 |
1 |
|
L |
0 |
63 |
3 |
0 |
27 |
0 |
0 |
7 |
|
U |
0 |
0 |
46 |
0 |
31 |
23 |
0 |
0 |
|
HR |
29 |
0 |
0 |
71 |
0 |
0 |
0 |
0 |
|
HL |
0 |
0 |
0 |
0 |
100 |
0 |
0 |
0 |
|
HU |
0 |
0 |
0 |
0 |
0 |
100 |
0 |
0 |
|
SR |
0 |
0 |
0 |
0 |
0 |
0 |
100 |
0 |
|
SL |
0 |
17 |
0 |
0 |
0 |
0 |
0 |
83 |
Таблица 4. Распознавание маневров по суммарному набору сигналов (T)
|
|
R |
L |
U |
HR |
HL |
HU |
SR |
SL |
|
R |
92 |
0 |
0 |
6 |
0 |
0 |
1 |
1 |
|
L |
0 |
83 |
0 |
0 |
11 |
0 |
0 |
6 |
|
U |
0 |
23 |
77 |
0 |
0 |
0 |
0 |
0 |
|
HR |
0 |
0 |
0 |
100 |
0 |
0 |
0 |
0 |
|
HL |
0 |
0 |
0 |
0 |
100 |
0 |
0 |
0 |
|
HU |
0 |
0 |
0 |
0 |
0 |
100 |
0 |
0 |
|
SR |
0 |
0 |
0 |
0 |
0 |
0 |
100 |
0 |
|
SL |
0 |
17 |
0 |
0 |
0 |
0 |
0 |
83 |
Таблица 5. Распознавание маневров всех наборов сигналов (A, G, T)
|
|
R |
L |
U |
HR |
HL |
HU |
SR |
SL |
Итог |
|
A |
72 |
68 |
23 |
71 |
100 |
100 |
100 |
83 |
77 |
|
G |
76 |
63 |
46 |
71 |
100 |
100 |
100 |
83 |
79 |
|
T |
92 |
83 |
77 |
100 |
100 |
100 |
100 |
83 |
91 |
Анализ качества вождения
В предлагаемой методике первичные показатели, характеризующие качество управления транспортным средством, представляют собой статистические данные за определенный период времени (опять же набор зарегистрированных маневров и их степень соответствия с эталонными)
Каждый из них имеет весовой коэффициент, сумма которых не должна превышать единицы. Весовой коэффициент можно охарактеризовать как приоритет влияния отдельного показателя на качество управления транспортом в целом (рис. 3).
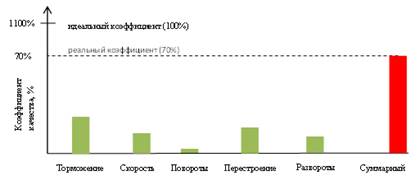
Рис. 3. Формирование коэффициента качества вождения.
Обратная связь с водителем
Для создания эффективной системы мониторинга с возможностью контроля качества вождения необходимо предусмотреть обратную связь системы с водителем (рис.4). Таким образом, в задачи системы входит не только отображение коэффициента качества вождения внутри системы, для последующего анализа, но и передача информации о качестве вождения непосредственно самому водителю ТС в режиме реального времени (рис.5).
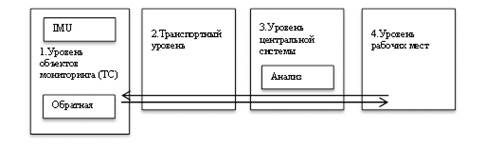
Рис. 4. Структурная модель системы с обратной связью

Рис.5 Отображения качества вождения в реальном времени
Заключение
В данной работе была определена концепция «Контроль качества вождения», представлены критерии качества вождения, как агрессивные и неагрессивные действия водителя. Так же был представлен способ для определения событий движения транспортного средства и алгоритмы для определения агрессивных маневров и принципа анализа качества вождения. Были означены возможные направления для дальнейших исследований и описана концепция создания системы мониторинга транспортных средств, с возможностью анализа качества вождения.
Рецензенты:
Горелик С.Л., д.т.н., профессор, НИУ ИТМО, г.Санкт-Петербург.
Федоров А.В., д.ф.-м.н., профессор, зав. кафедрой ОФ и СЕ НИУ ИТМО, г.Санкт-Петербург.
Библиографическая ссылка
Капитонов Ф.А. СИСТЕМА МОНИТОРИНГА ТРАНСПОРТНЫХ СРЕДСТВ, С ВОЗМОЖНОСТЬЮ КОНТРОЛЯ КАЧЕСТВА ВОЖДЕНИЯ // Современные проблемы науки и образования. 2014. № 3. ;URL: https://science-education.ru/en/article/view?id=13745 (дата обращения: 17.05.2026).