


Scientific journal
Modern problems of science and education
ISSN 2070-7428
"Перечень" ВАК
ИФ РИНЦ = 0,936
COMPLEX OF PROGRAMS FOR CALCULATION OF PARAMETERS PLATED MAGNETOSTRICTIVE CONVERTERS OF THE LEVEL WITH COMPLEX GEOMETRY OF THE ACOUSTIC PATH

Введение
В условиях стремительного развития современной промышленности возрастает потребность в быстродействующих и высокоточных приборов измерения уровня различных сред, способных работать в составе автоматизированных систем. Одним из наиболее перспективных классов таких устройств являются байпасные магнитострикционные преобразователи уровня (МПУ) накладного типа. Принцип работы этих МПУ основан на явлении магнитострикции, и они отличаются высокой разрешающей способностью скоростью работы при низкой себестоимости изготовления [3].
Улучшение характеристик существующих моделей накладных МПУ с байпасными камерами представляется возможным путем проведения их математического моделирования с использованием ЭВМ и специализированного программного обеспечения. Основной трудностью при моделировании подобных устройств является сложная геометрия расчетной области и многие известные математические системы, такие как ELCUT, Littlemag, MATLAB и др., обладают рядом недостатков, затрудняющих их применение для моделирования байпасных МПУ накладного типа [1]. Поэтому авторами был разработан собственный программный комплекс, ориентированный на интеграцию с системой MATLAB, для расчета основных параметров рассматриваемых устройств.
Постановка задачи
Рассмотрим байпасный МПУ накладного типа, расчетная схема которого изображена на рисунке 1.
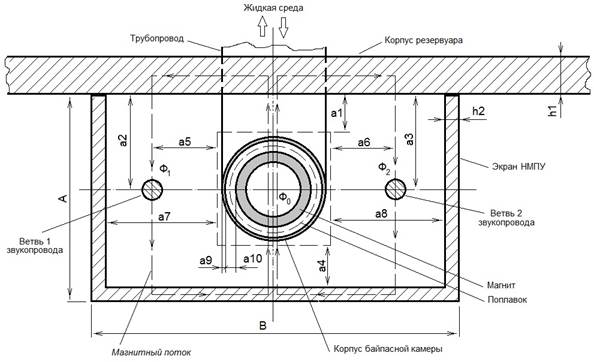
Рисунок 1 – Расчетная схема байпасного МПУ накладного типа (поперечный разрез)
Из рисунка 1 видно, что для полного описания конструкции этого МПУ должны быть заданы следующие параметры: длина, ширина и толщина экрана (А,В,h2), толщина корпуса резервуара (h1), радиус кольцевого постоянного магнита (Ф0), радиусы ветвей звукопровода (Ф1,Ф2), а также расстояния а1..а10.
Возникает задача разработки комплекса программ для проведения математического моделирования магнитных полей и выходных характеристик байпасных МПУ накладного типа при заданных параметрах расчетной области и материалов, из которых изготовлены их элементы.
Методы испытаний
Для разработки программного комплекса была выбрана среда визуального программирования Borland Delphi v.7 как наиболее удобное и распространенное средство для написания подобных программ. Явным преимуществом этой системы является простота работы с внешними файлами и возможность обмена данными с математическим пакетом MATLAB, в котором осуществляется графическое построение зависимостей, полученных в ходе работы программы.
Расчет напряженности магнитного поля байпасного МПУ накладного типа выполнется на основе решения системы уравнений Максвелла для электромагнитного поля [5]. Известно, что методом сеток эта система может быть сведена к системе конечно-разностных уравнений, записываемых для каждого узла сетки методом баланса, вида [4]:
![]() (1)
(1)
где ![]() искомые значения магнитных потенциалов в узлах,
искомые значения магнитных потенциалов в узлах, ![]() – величина, обратная магнитной проницаемости i-го узла сетки,
– величина, обратная магнитной проницаемости i-го узла сетки, ![]() – ток проводимости i-го узла сетки.
– ток проводимости i-го узла сетки.
Таким образом, система уравнений вида (1) является алгебраической и может быть решена численными методами, с любой степенью точности. В качестве численного метода решения данной системы был выбран модифицированный попеременно треугольный метод, характеризующийся высокой скоростью сходимости и простотой итерационной схемы [2].
Получение выходных сигналов байпасного МПУ накладного типа (амплитуд напряжений, несущих информацию об уровне) осуществляется аналитически в соответствии с известными методиками, изложенными, например, в [3].
Результаты вычислительного эксперимента и их обсуждение
С учетом всего вышесказанного, в среде Borland Delphi v.7 был разработан программный комплекс «Моделирование МПУ».
Для проведения моделирования с его помощью необходимо вначале задать геометрические размеры расчетной области байпасного МПУ накладного типа (рисунок 1). Это осуществляется путем заполнения соответствующих полей для ввода данных окна «Тип объекта». В окне «Параметры» необходимо указать те параметры звукопровода, постоянного магнита и электро-акустического преобразователя (ЭАП) байпасного МПУ накладного типа, которые необходимо учесть при моделировании. Например, окно ввода параметров звукопровода байпасного МПУ накладного типа показано на рисунке 2.
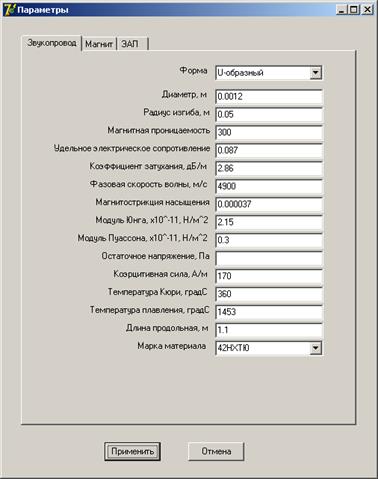
Рисунок 2 – Окно для ввода параметров звукопровода МПУ
Результаты моделирования магнитного поля байпасного МПУ накладного типа при фиксированных значениях параметров конструкции с помощью разработанного программного комплекса приведены на рисунке 3.
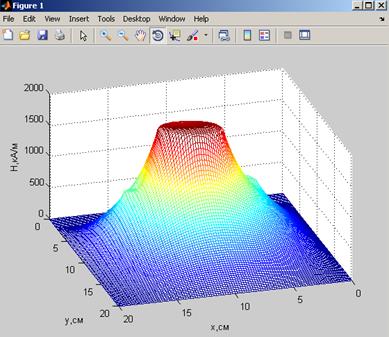
Рисунок 3 – Зависимость напряженности H магнитного поля МПУ от координат x, y
Кроме расчета общей картины поля в расчетной области, программой предусмотрена возможность получения зависимости напряженности H вдоль заданного контура. Например, на рисунке 4 показан график зависимости напряженности H магнитного поля постоянного магнита байпасного МПУ накладного типа вдоль линии, проходящей через центры ветвей звукопровода и постоянный магнит (см. рисунок 1).
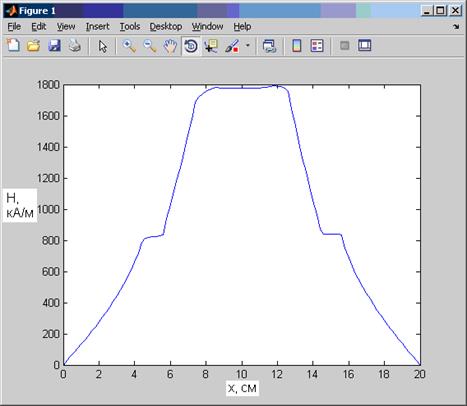
Рисунок 4 – Зависимость напряженности H магнитного поля постоянного магнита вдоль заданного контура
После проведения расчета магнитного поля байпасного МПУ накладного типа имеется возможность получения моделей выходных сигналов преобразователя. Эти зависимости имеют вид, показанный на рисунке 5.
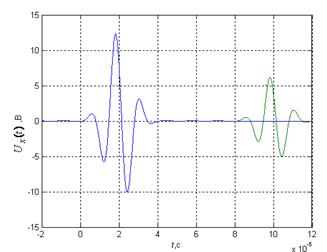
Рисунок 5 – Временные диаграммы напряжения на выходе ЭАП
Эти сигналы преобразуются аналого-цифровым преобразователем в цифровой код уровня, который может использоваться для дальнейшей обработки системой автоматизированного управления технологическим объектом.
Выводы
Таким образом, разработанный комплекс программ «Моделирование МПУ» позволяет путем использования конечно-разностной аппроксимации системы Максвелла численно рассчитывать магнитное поле байпасных МПУ накладного типа. На основе этих данных и конструктивных параметров формируются модели выходных сигналов преобразователя, несущих информацию об уровне контролируемого объекта. Это позволяет расширить возможности современных математических систем моделирования для исследования байпасных МПУ накладного типа.
Результаты математического моделирования байпасных МПУ накладного типа с применением разработанного комплекса программ дают возможность провести комплексное исследование таких приборов и выработать рекомендации для улучшения их характеристик. Анализ моделей выходных сигналов позволяет выявить оптимальное соотношение параметров конструкции для формирования ультразвуковой волны кручения в среде звукопровода и её уверенного считывания сигнальным ЭАП МПУ.
Следует отметить, что разработанный программный комплекс может быть модифицирован для проведения математического моделирования и других магнитострикционных преобразователей. Это достигается за счет модульной структуры программы, при которой алгоритм реализованного численного метода можно легко применить для работы с другими расчетными областями.
Рецензенты:
Султанов Б.В., д.т.н., профессор кафедры «Информационная безопасность систем и технологий» Пензенского государственного университета, г. Пенза.
Сальников И.И., д.т.н., профессор, заведующий кафедрой «Вычислительные машины и системы» Пензенского государственного технологического университета, г. Пенза.
Библиографическая ссылка
Мокроусов Д.А., Карпухин Э.В., Демин С.Б., Дятков В.С. КОМПЛЕКС ПРОГРАММ ДЛЯ РАСЧЕТА ПАРАМЕТРОВ МАГНИТОСТРИКЦИОННЫХ ПРЕОБРАЗОВАТЕЛЕЙ УРОВНЯ НАКЛАДНОГО ТИПА СО СЛОЖНОЙ ГЕОМЕТРИЕЙ АКУСТИЧЕСКОГО ТРАКТА // Современные проблемы науки и образования. 2014. № 3. ;URL: https://science-education.ru/en/article/view?id=13707 (дата обращения: 15.07.2026).