



Учебным планом по специальности «Технология» предусматривается изучение как теоретических дисциплин физико-математического и технического циклов, так и приобретение практических умений и навыков (слесарный, токарный и др. технологические практикумы). Для объединения этих двух направлений с целью более эффективного обучения студентов, на наш взгляд, необходимо включение в учебный процесс творческих проектов, и в частности расчет, конструирование и изготовление самодельных приборов для демонстрации на лекциях и лабораторного практикума. Как считал лауреат Нобелевской премии по физике академик П.Л. Капица, «школьник (а это относится в полной мере и к студентам) понимает физический опыт тогда хорошо, когда он делает его сам. Но еще лучше он понимает его (опыт), если сам делает прибор для его эксперимента» [1].
В работе рассматриваются теоретические принципы работы двух приборов, предназначенных для демонстрации на лекциях и использования на лабораторном практикуме по механике, и технология их изготовления.
Целью данного исследования является описание творческих проектов, направленных на моделирование механических процессов путём конструирования и изготовления приборов, демонстрирующих эти процессы.
Материал исследования – механические процессы, которые моделируются с помощью изготовленных приборов.
Методы исследования: математическое моделирование, сопоставление расчётных значений с экспериментальными данными, полученными на приборах, изготовленных на занятиях по технологии.
Результатом исследования является разработка творческих проектов в рамках механики твёрдого тела, включающих в себя моделирование, конструирование и изготовление приборов на занятиях технологии для наблюдения механических процессов.
Данная методическая разработка обсуждалась на кафедре теоретической, общей физики и технологии, а изготовленные приборы применяются в учебном процессе.
Первый прибор моделирует определение реакций связи в силовой конструкции, на которую действуют внешние силы. Рассмотрим эту силовую конструкцию.
К вертикальной плоской основе (стойке, стене) при помощи шарнира (болта) A прикреплен кронштейн (балка) АВ длиной  удерживаемый в горизонтальном положении гибким тросом СD, привязанным к кронштейну в точке С и направленным под углом
удерживаемый в горизонтальном положении гибким тросом СD, привязанным к кронштейну в точке С и направленным под углом  к горизонту. В точке С кронштейна висит груз весом P (рис. 1).
к горизонту. В точке С кронштейна висит груз весом P (рис. 1).
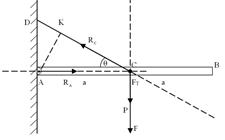
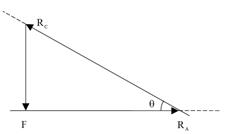
Рис. 1. Схема силовой конструкции Рис. 2. Силовой треугольник
Учитывая, что сила тяжести кронштейна  приложена в точке С, найти реакции троса
приложена в точке С, найти реакции троса и шарнира
и шарнира  если
если 
Нужно отметить, что эта задача имеет практическое применение, т.к. найдя реакции иможно, используя третий закон Ньютона, определить силы, приложенные к тросу в точке С и к шарниру в точке A. Это позволяет определить предельный вес P, который может выдержать трос и шарнир при условии, что прочность троса и шарнира заданы. Эту задачу можно решить несколькими методами, рассмотренными в работе [2]. Рассмотрим решения двумя методами, используя теорему о трех силах [3]. Для этого известные сонаправленные силы  и
и  [4], приложенные в точке С, заменим одной силой
[4], приложенные в точке С, заменим одной силой  направленной так же, как и и
направленной так же, как и и  и приложенной в точке С.
и приложенной в точке С.
Таким образом, к кронштейну приложены три силы: одна активная  и две реактивные
и две реактивные  и
и которые требуется определить. Поскольку система сил
которые требуется определить. Поскольку система сил 

 плоская и находится в равновесии, и считая, что кронштейн − абсолютно твердое тело, как и пространство, его окружающее, то можно воспользоваться теоремой о трех силах как о сходящейся системе сил. Поскольку линии действия таких сил пересекаются в одной точке (точка С на рис. 1), то переносим все силы по линиям действия (скользящие вектора) так, чтобы их начала совпали с точкой С. При этом получается система трех сил, приложенных в одной точке, равная нулю.
плоская и находится в равновесии, и считая, что кронштейн − абсолютно твердое тело, как и пространство, его окружающее, то можно воспользоваться теоремой о трех силах как о сходящейся системе сил. Поскольку линии действия таких сил пересекаются в одной точке (точка С на рис. 1), то переносим все силы по линиям действия (скользящие вектора) так, чтобы их начала совпали с точкой С. При этом получается система трех сил, приложенных в одной точке, равная нулю.
 (суммируем в точке С) (1)
(суммируем в точке С) (1)
Первый метод − метод силового треугольника.
Эта система сил позволяет построить силовой треугольник, изображенный на рис. 2.
Для определения величин сил и можно воспользоваться подобием силового треугольника  и треугольника АDС, из которого следует соотношение
и треугольника АDС, из которого следует соотношение
 (2)
(2)
Однако в данном случае проще неизвестные величины сил и найти из силового треугольника, изображенного на рис. 2
 (3)
(3)
 (4)
(4)
В частности, если  то
то 

Второй метод − метод моментов сил.
В этом методе также используется уравнение (1), а также вывод о том, что если главный вектор системы сил равен нулю, то главный момент не зависит от точки, относительно которой он берется [5]. В частности, если главный момент относительно какой-то точки равен нулю, то он будет равен нулю относительно любой другой точки.
В данном методе неизвестные силы  и прикладываются в соответствующих точках A и С и направляются по линиям действия в любую сторону. Если в результате расчета окажется, что сила имеет отрицательный знак, то направление силы нужно поменять на противоположное. Зададим силы и так, как показано на рис. 1.
и прикладываются в соответствующих точках A и С и направляются по линиям действия в любую сторону. Если в результате расчета окажется, что сила имеет отрицательный знак, то направление силы нужно поменять на противоположное. Зададим силы и так, как показано на рис. 1.
Согласно рис. 1 главный момент сил относительно точки С равен нулю, т.к. эти силы сходятся в точке С, поэтому в соответствии с изложенным выше, он будет равен нулю и относительно любой точки. В частности, относительно точки А главный момент равен
 (5)
(5)
Здесь момент силы плоской системы считается положительным, если он направлен так, что если смотреть с его конца, то сила вращает плоскость расположения сил относительно точки против часовой стрелки и наоборот.
Из (5)
 (6)
(6)
AK находится из прямоугольного треугольника AKC и равен  Подставляя это значение АК, получаем:
Подставляя это значение АК, получаем:
 (7)
(7)
что совпадает с (4).
Найдем силу 
Главный момент относительно точки D равен
 (8)
(8)
И поэтому
 (9)
(9)
Из треугольника  имеем:
имеем:
 (10)
(10)
Подставляя (10) в (9), имеем:
 (11)
(11)
что совпадает с (3).
Рассмотрим технологические аспекты изготовления модели этой силовой конструкции.
Вертикальная стойка изготовлялась из дерева (сосна) в виде прямоугольной рамки, вертикальные стороны которой представляли собой брусья круглого сечения диаметром 35 мм и высотой 800 мм. В средней части этих брусьев делались отверстия диаметром 5 мм. В них в дальнейшем вставлялась горизонтально расположенная стальная ось диаметром 5 мм, на концах которой нарезалась резьба М5, закрепленная неподвижно на стойке с помощью гаек. Горизонтально расположенные стороны рамки (поперечины-брусья) брусья прямоугольного сечения (50×40 мм) и длиной 300 мм. В средней части верхнего поперечного бруса располагалась металлическая петля для крепления измерительной пружины и гибкого троса к стойке (точка D). Кронштейн АB представлял собой деревянный брус круглого сечения диаметром 35 мм и длиной 600 мм. Вблизи левого торца бруса (со стороны крепления к шарниру) в средней части бруса делалась сквозная горизонтальная прорезь длиной 70 мм и шириной 20 мм. С левого торца кронштейна вдоль оси до прорези делалось отверстие диаметром 3 мм. В средней части кронштейна на его верхней поверхности установилась металлическая петля (точка С) для крепления гибкого троса, а в нижней поверхности устанавливалась такая же петля для крепления висящего груза весом P.
Для измерения реакции троса на кронштейн необходимо стальную ось закрепить на вертикальных стержнях стойки таким образом, чтобы угол между тросом, закрепленным верхним концом в петле на верхней поперечине стойки, а другим концом в петле на середине горизонтально расположенного кронштейна, составлял угол  Гибкий трос представлял собой упругую измерительную пружину, которая верхним концом крепилась без трения в петле на верхней поперечине стойки, а другим концом к тросу, который в свою очередь крепился другим концом к петле в средней части кронштейна. Шкала располагалась вдоль пружины, не касаясь ее, и крепилась к неподвижному верхнему концу пружины. Эта пружина тарировалась отсоединением троса от кронштейна и присоединением этого троса к динамометру.
Гибкий трос представлял собой упругую измерительную пружину, которая верхним концом крепилась без трения в петле на верхней поперечине стойки, а другим концом к тросу, который в свою очередь крепился другим концом к петле в средней части кронштейна. Шкала располагалась вдоль пружины, не касаясь ее, и крепилась к неподвижному верхнему концу пружины. Эта пружина тарировалась отсоединением троса от кронштейна и присоединением этого троса к динамометру.
Наиболее сложную часть представлял собой «шарнир», который, помимо крепления кронштейна к стойке, должен еще измерять реакцию шарнира на кронштейн. «Шарнир» представлял собой деревянную втулку, выточенную из квадратного бруса длиной 120 мм, причем втулка протачивалась длиной 80 мм с тем, чтобы оставалась непроточенной часть квадратного бруса длиной 40 мм. Внешний диаметр втулки имел размер 16 мм для того, чтобы втулка входила в прорезь, сделанную в кронштейне с зазором порядка 2 мм. Диаметр внутреннего сквозного отверстия втулки 5 мм с тем, чтобы во втулку вставлялась ось. Втулка вставлялась в прорезь кронштейна. И, таким образом, кронштейн мог, во-первых, проворачиваться во втулке и, во-вторых, перемещаться поступательно вдоль прорези кронштейна, а втулка могла проворачиваться на металлической оси, которая крепилась неподвижно к вертикальным сторонам стойки. Втулка располагалась так, чтобы боковые грани квадратной части втулки были расположены вертикально и грань, расположенная к левому концу кронштейна, срезалась заподлицо с втулкой. В качестве упругого элемента, который измеряет реакцию , брался кусок обломанного ножовочного по металлу полотна, который располагался вдоль втулки, а обломанный его конец закреплялся металлической накладкой с помощью двух шурупов на срезанной заподлицо грани квадратной части втулки. Таким образом, кусок ножовочного полотна был расположен вдоль втулки с закрепленным концом на квадратной части втулки. Второй его конец, на котором имеется отверстие, должен был совпасть с центром кронштейна, пока был свободен. Кронштейн перемещался так, чтобы его прорезь двигалась относительно втулки до тех пор, пока отверстие вдоль оси кронштейна не совпадёт с отверстием в ножовочном полотне. С помощью болта конец ножовочного полотна скрепляется с кронштейном гайкой, которая наворачивается на торце кронштейна. Перед креплением болта гайкой необходимо вставить шайбу с петлей для того, чтобы тарировать такую упругую систему. Таким образом, кронштейн, с одной стороны, перемещался поступательно в прорези, изгибая ножовочное полотно, а с другой − проворачивался вдоль втулки, которая, в свою очередь, проворачивалась вокруг неподвижной металлической оси.
Описанную упругую систему необходимо было тарировать, исключив силу тяжести кронштейна. Для этого стойку необходимо вертикально жестко закрепить, отсоединить верхний конец пружины от стойки в точке D и, направив трос с пружиной вертикально, прикрепить конец троса к неподвижной опоре, предварительно растянув пружину так, чтобы кронштейн расположился горизонтально. Тогда сила тяжести кронштейна, приложенная в точке С, уравновесится силой реакции троса, приложенной к кронштейну также в точке С.
Для тарировки упругой системы (ножовочное полотно, кронштейн, втулка) к петле на торце кронштейна необходимо прикрепить горизонтально расположенный динамометр.
Тогда при горизонтальном перемещении динамометра в сторону от кронштейна кронштейн начнет перемещаться вдоль прорези относительно неподвижной втулки, соединенной с неподвижной стойкой. Эти перемещения необходимо отмечать делениями на кронштейне. Это связано с тем, что ножовочное полотно, соединенное одним концом с втулкой, а другим с кронштейном, будет изгибаться, создавая усилия, указываемые динамометром. Эти усилия и отмечаются около делений на кронштейне. В собранном виде установка располагается на столе вертикально и за нижнюю поперечину крепится струбциной к краю стола. Изображение прибора приведено в конце статьи.
Второй прибор служит для демонстрации свойств момента инерции однородного шара, вращающегося вокруг оси, которая проходит через центр шара. Если к шару, который может вращаться вокруг неподвижной оси, приложен вращающий момент относительно оси, то под его действием шар получает угловое ускорение, т.е. начинает ускоренно вращаться. При этом вращающий момент  и угловое ускорение
и угловое ускорение  связаны соотношением [6]
связаны соотношением [6]
 (12)
(12)
где  − момент инерции шара относительно оси вращения − характеризует инертность шара при его вращательном движении вокруг оси, проходящей через центр шара.
− момент инерции шара относительно оси вращения − характеризует инертность шара при его вращательном движении вокруг оси, проходящей через центр шара.
Момент инерции шара относительно оси вращения, проходящей через его центр, рассчитывается по формуле [7]:
:
 , (13)
, (13)
где  − плотность шара,
− плотность шара,  − элемент массы шара;
− элемент массы шара;  − расстояние от элемента массы шара до центра,
− расстояние от элемента массы шара до центра,  − расстояние от элемента массы до оси вращения, и
− расстояние от элемента массы до оси вращения, и  − углы в сферической системе координат,
− углы в сферической системе координат,  − масса шара;
− масса шара;  − его радиус.
− его радиус.
Если к шару приложен вращающий момент  величина которого в процессе вращения остается постоянной, то вращение тела будет равноускоренным. Наблюдая равноускоренное вращение шара под действием постоянного момента и измеряя соответствующим образом угловое ускорение
величина которого в процессе вращения остается постоянной, то вращение тела будет равноускоренным. Наблюдая равноускоренное вращение шара под действием постоянного момента и измеряя соответствующим образом угловое ускорение  можно определить момент инерции шара относительно оси вращения:
можно определить момент инерции шара относительно оси вращения:
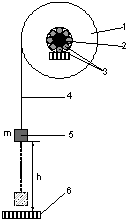
Рис. 3. Схема установки для определения момента инерции шара относительно оси
 (14)
(14)
Однородный шар 1 (рис. 3) жестко укреплён на валу 2. Вал может вращаться в подшипниках 3 с малым трением около горизонтальной оси. Ось вращения проходит через центр тяжести шара по одному из его диаметров. На шаре имеется маленькое отверстие для продевания капроновой нити 4, которая наматывается в несколько оборотов на шар перпендикулярно оси вращения. На свободный конец нити подвешивается груз 5 ( ), приводящий всю систему в равноускоренное движение. Также крепится сантиметровая линейка 6.
), приводящий всю систему в равноускоренное движение. Также крепится сантиметровая линейка 6.
Под действием груза 5 на маховик будет действовать вращающий момент M, равный произведению силы F, с которой груз действует на нить, на плечо  то есть:
то есть:
 (15)
(15)
где D − диаметр шара.
Если груз действует на нить с силой F , то нить действует на груз с силой P, и в соответствии с третьим законом Ньютона [8] эти силы равны по величине и противоположны по направлению, то есть:
 (16)
(16)
Для определения силы F рассмотрим движение груза вниз. На груз действуют две силы: со стороны Земли −  (сила тяжести
(сила тяжести  ) и со стороны нити
) и со стороны нити  Под действием этих сил груз будет двигаться равноускоренно с ускорением
Под действием этих сил груз будет двигаться равноускоренно с ускорением  . Согласно второму закону Ньютона и (16) имеем:
. Согласно второму закону Ньютона и (16) имеем:
 (17)
(17)
где − масса груза. Отсюда в проекции на вертикальную координатную ось, направленную вниз, получим:
 (18)
(18)
где g - ускорение свободного падения.
Вращающий момент M из (15) с учётом (18) определяется выражением
 . (19)
. (19)
Тогда момент инерции однородного шара на основании (14) равен:
 (20)
(20)
где  - угловое ускорение однородного шара. Угловое ускорение шара и тангенциальное ускорение
- угловое ускорение однородного шара. Угловое ускорение шара и тангенциальное ускорение  точек, лежащих на его ободе, связаны следующим образом:
точек, лежащих на его ободе, связаны следующим образом:
 (21)
(21)
Тангенциальное ускорение , с которым вращаются точки, лежащие на ободе шара (нить накручена на шар), и линейное ускорение a, с которым опускается груз, равны ( ).
).
Величину линейного ускорения  можно выразить из закона пути для равноускоренного движения:
можно выразить из закона пути для равноускоренного движения:
 (22)
(22)
где h − высота, с которой опускается груз.
С учётом (21) и (22) окончательно получим расчётную формулу для момента инерции однородного шара:
 (23)
(23)
Момент инерции однородного шара относительно любой оси, проходящей через его центр, определяется по (13).
Приравняв правые части (13) и (23), с учетом что  , выразим значение массы шара
, выразим значение массы шара

 (24)
(24)
Рассмотрим технологию изготовления этого прибора.



Рис. 4а. Силовая конструкция Рис. 4б. Фрагмент измерительной Рис. 5. Установка для определения
части «шарнир» момента инерции шара
К чугунному шару диаметром 152 мм была приварена стальная ось диаметром 20 мм и длиной 250 мм. По экватору шара, образованному пересечением плоскости перпендикулярной оси и поверхности шара, крепился кольцеобразный желобок, выполняющий роль шкива. На шкив в дальнейшем наматывалась капроновая нить, на конец которой крепился груз. На ось симметрично по центру шара надевались с обеих сторон подшипники, расположенные на расстоянии 170 мм друг от друга. Эта конструкция далее располагалась на стойке. Стойка представляла собой два стальных швеллера профиля № 12 длиной 250 мм, высотой 120 мм, шириной 50 мм, в которых в средней их части на расстоянии 120 мм от торца делались отверстия диаметром, равным внешнему диаметру подшипника. В эти отверстия в дальнейшем вставлялись подшипники. Один из швеллеров торцом приваривался к стальной пластине длиной 350 мм, шириной 120 мм, толщиной 10 мм, имеющей по углам отверстия. Конструкция (шар с осью и надетыми на неё подшипниками) располагалась так, чтобы один из подшипников вошел в отверстие швеллера, приваренного к пластине. Второй швеллер располагался так, чтобы в отверстие в нем вошел второй подшипник, а один из торцов находился на поверхности пластины. При этом необходимо было следить за тем, чтобы не было перекосов и шар мог свободно вращаться в подшипниках. Торец второго швеллера приваривался к пластине. С помощью четырех болтов, введенных в отверстия пластины, это устройство жестко крепилось к стене. Далее эта установка центрировалась высверливанием выемок в шаре.
В собранном виде первый прибор изображен на рис. 4а, а фрагмент (измерительная часть «шарнир») - на рис. 4б. Второй прибор в собранном виде изображен на рис. 5.
Заключение
Представленные в статье творческие проекты, объединяющие моделирование механических процессов с последующим конструированием и изготовлением демонстрирующих их приборов, позволяют студентам глубже осмыслить изучаемые явления.
Библиографическая ссылка
Жорник А.И., Кихтенко С.Н., Сушкин К.Ю. ИЗГОТОВЛЕНИЕ ПРИБОРОВ ДЛЯ ДЕМОНСТРАЦИОННОГО И ЛАБОРАТОРНОГО ПРАКТИКУМОВ НА ЗАНЯТИЯХ ПО ТЕХНОЛОГИИ // Современные проблемы науки и образования. – 2017. – № 5. ;URL: https://science-education.ru/ru/article/view?id=26798 (дата обращения: 25.04.2024).