



Робот – автоматическое устройство, созданное по принципу живого организма. Действуя по заранее заложенной программе и получая информацию о внешнем мире от датчиков (аналогов органов чувств живых организмов), робот самостоятельно осуществляет производственные и иные операции, обычно выполняемые человеком (либо животными). При этом робот может, как и иметь связь с оператором (получать от него команды), так
и действовать автономно. Сообщения об автоматических технических устройствах с более или менее сложной механикой, предназначаемых не для выполнения конкретных работ, а только для демонстрации, занимают все большее место в средствах информации, большинство их называется роботами.
Для решения практических задач и повышению уровня подготовки студентов, обучающихся на кафедре «Технология машиностроения и информационных технологии» Зеленодольского (филиала) института КНИТУ-КАИ, был спроектирован и изготовлен «Робот - информатор» (см. Рис.1).

Рис.1. Робот - информатор
Многофункциональный робот- информатор предназначен в первую очередь для показа научного потенциала студентов Зеленодольского (филиала) института КНИТУ-КАИ, а потом уже для презентаций своих способностей.
Основные технические данные и характеристики станка
1. Габаритные размеры: 500х760х1300
2. Функциональные возможности: Дистанционное перемещение.
3. Голосовая и визуальная связь.
Элементы механической части
1. Серводвигатель постоянного тока
2. Шаговый двигатель малогабаритный биполярный
3. Подшипниковая опора
4. Материалы для корпуса конструкции
5. Колёса
Элементы электроники
1. Драйвер сервопривода
2. Многоканальный драйвер
3. Блок питания
4. Контроллер
5. Wi-Fi приёмник
6. Электромагнитные компоненты
Многофункциональный робот - информатор имеет возможность перемещаться по горизонтальной поверхности за счет колёсной базы 4х2 с приводом на заднюю ось. Одним из элементов позволяющий делать это перемещение является шаговый двигатель с драйвером сервопривода. Данное устройство имеет большой диапазон регулирующих настроек. В зависимости от условий эксплуатации можно регулировать крутящий момент и частоту оборотов вращения вала.
Помимо возможности перемещения, данный «Многофункциональный робот - информатор» наделён функцией воспроизведения видео картинки. Wi-fi роутер размещённый в голове робота, передаёт по беспроводной связи сигнал на любое устройство, воспринимающее его. Далее при подключений к локальной сети мы можем наблюдать визуальную картинку в реальном времени. Это необходимо для того, чтобы оператор управляющий данным «Многофункциональным роботом - информатором» мог дистанционно им управлять.
Ещё одним плюсом является что «Многофункциональным роботом - информатором» синтезируется речь, ранее написанная для его озвучивания. Данная функция позволяет приблизить неодухотворённое существо к человеку. Придать ему интерес.
Создание имитации движения в системе Концептуальная разработка кинематических механизмов NX
Имитация движения механизма позволяет непосредственно увидеть движение его частей. Это важно, но зачастую этого бывает недостаточно. Unigraphics предоставляет в распоряжение инженера инструмент постановки задач анализа пересечений, минимальных зазоров и трассировки двигающихся деталей. При последующей имитации движения можно поставить разные условия: остановить движение при соприкосновении или уменьшении зазора между деталями, создать тело в пересечении указанных звеньев, дать сообщение о нарушении условия и продолжить движение.
Создание механизма включает в себя следующие этапы:
- определение звеньев механизма в виде набора любых геометрических элементов: твердых тел, поверхностей, кривых, точек;
- задание кинематических связей между звеньями: вращение в плоскости, линейное перемещение, вращение с перемещением вдоль оси вращения, винтовая пара, ременная передача, кардан, сферический шарнир, двухосевое перемещение в плоскости, зубчатая рейка, зубчатая передача, движение точки по кривой и «обкатка» кривой по кривой;
По завершении этих этапов задается временной интервал, осуществляется имитация движения.
Рассмотрим подробнее процесс создания механизма.
В среде NX можно воспользоваться несколькими приложениями для создания кинематики. Воспользовавшись приложением «концептуальная разработка кинематических систем». В других версиях NX возможно изменено оглавление, а данное приложение может называться «Mehanotronics».
Заходим в приложение «концептуальная разработка кинематических систем». На данном этапе мы уже имеем модель робота в контексте сборки.
Первоначальной задачей является указать характер тел. В нашем случае мы выбираем жесткие тела.
Указываем каждый элемент, учитывая его движение, т.е. необходимо указать несколько элементов как одно целое. Например, рама - неподвижная часть робота. На раму крепятся некоторые элементы колёсной базы, полуоси, шаговый двигатель, подшипник и элементы крепежа. Целесообразно объединить эти элементы в одно « жесткое тело».
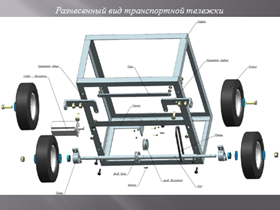
Рис.3 Элементы, участвующие в сборке
Таким образом, указываем все элементы, участвующие в сборке.
Когда все элементы выбраны, необходимо указать характер их движения. Шарнирное соединение, соединение со скольжением, цилиндрическое соединение, шаровое соединение, неподвижное соединение, соединение угловой пружиной, соединение линейной пружины, соединение углового предела, соединение с линейным пределом. В появившимся диалоговом окне задаем необходимые параметры. А именно для демонстрации передвижений используем траекторию движения заранее созданной операции. Для этого выписываем все координаты движения при обработке отдельно для X Y Z. Для данного примера используем координату Y. Создаем Новый профиль движения. Полученные координаты заносим в таблицу. Важным моментом является правильное ориентирование во времени.
Заглядывая в недалёкое будущее, мы понимаем, что роботизация всё больше и больше участвует на производстве, в быту она стала повседневным атрибутом человеческой жизни.
Таким образом, в Зеленодольском институте машиностроения и информационных технологии (филиала) КНИТУ-КАИ планируется и далее уделять большое внимание развитию данного направления. Так как это будет развивать у потенциальных выпускников института, навыки работы со станками с программным управлением и компьютерными технологиями.
Рецензенты:
Газизуллин К.М., д.т.н., профессор кафедры «Динамика и прочность машин» ФГБОУ ВПО Казанского государственного энергетического университета Минобрнауки РФ, г. Казань. Лунев А.Н., д.т.н., профессор кафедры «Технологий машиностроительных производств» КНИТУ-КАИ, г. Казань.
Библиографическая ссылка
Трофименко О.В., Белавин А.Ю., Абзалов А.Р. МНОГОФУНКЦИОНАЛЬНЫЙ ОПЫТНЫЙ ОБРАЗЕЦ РОБОТА // Современные проблемы науки и образования. – 2015. – № 2-3. ;URL: https://science-education.ru/ru/article/view?id=23423 (дата обращения: 18.04.2024).