



Оперативность систем телемеханики (SCADA-систем) определяется быстродействием, точностью привязки информации к метке времени, а также минимизацией (оптимальным использованием) пауз между рабочими циклами [3; 4].
Многими исследователями и производителями показатель быстродействия трактуется как отношение длины передаваемого информационного сообщения к номинальной скорости передачи сигналов по каналу связи контролируемый пункт (КП) – пункт управления (ПУ).
Замена показателя быстродействия временем передачи одного сообщения по каналу связи искажает реальные параметры системы SCADA, особенно в наиболее важные и ответственные моменты – при работе в нештатной ситуации. Действительно, такой показатель «быстродействия» не учитывает:
- вероятность искажения данных на любом участке трассы доставки информации от источника приемнику, в том числе в канале связи. Искажения вызывают отказ приемника от обработки и регистрации поступивших данных, т.е. приводит к отсутствию подтверждающей квитанции;
- задержку между завершением первичной и началом повторной передачи сообщения при искажении ранее переданного сообщения;
- вероятность искажения данных при вводе информации от датчиков;
- задержки и искажения информации в любом модуле и устройстве, включенном в трассу доставки информации источника в приемник;
- задержку начала как первичной, так и повторной передачи сообщения из-за занятости ответственных за передачу и прием компонентов КП и ПУ.
Реальное быстродействие - это задержка между моментами возникновения «события» и его фиксацией (отображением) средствами, предоставленными в распоряжение получателя информации. Для оценки реального быстродействия рассмотрим доставку информации от датчика, размещенного в КП, в приемник ПУ [5].
Анализ показывает, что при реализации базового протокола (БП) МЭК 870-5-101 чаще всего используется один общий для всех модулей устройства КП буфер передачи данных в канал связи [1; 2]. Содержимое буфера определяется по результату обработки центральным контроллером текущей информации, полученной к данному моменту времени от модулей устройства КП. В таком варианте содержимое буфера не должно изменяться до получения подтверждающей квитанции или принудительного гашения содержимого буфера при нескольких неудачных попытках передачи и неискаженного приема информации. Если в рассматриваемом варианте искажение информации не устраняется и проводится принудительное гашение буфера, ранее введенная в буфер информация оказывается безвозвратно потерянной, если за время передачи ранее сформированного сообщения изменяется любой параметр текущей базы данных.
Для того чтобы определить достаточность организации в контроллере КП только одного буфера для передачи данных в ПУ, необходимо доказать, что за время передачи ранее сформированного сообщения (хранимого в буфере) не возникла необходимость формирования и передачи нового информационного сообщения. На рисунке 1 показана модель передачи сообщения, позволяющая провести анализ возможности потери информации и определить вероятные затраты времени на передачу одного информационного сообщения.
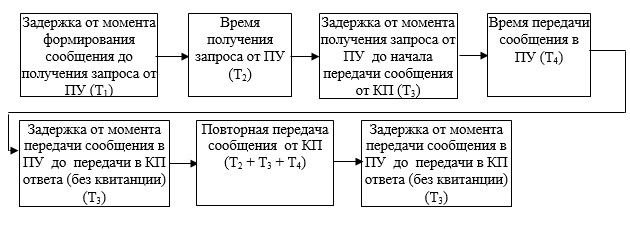
Рис. 1. Модель передачи сообщения по каналу связи КП – ПУ.
В результате обработки полученной контроллером информации от всех связанных с ним модулей устройства может возникнуть необходимость передачи 0…q информационных сообщений по каналу связи с ПУ. Вероятное время, затрачиваемое на передачу информационных сообщений, равно:
TПЕР =![]() , (1)
, (1)
где PI - вероятность необходимости проведения i-го информационного обмена; ti – время, затрачиваемое на реализацию i-го информационного обмена.
Для рассматриваемых примеров 0 ≤ q ≤ 2n, где n – число модулей, подключенных к устройству КП. Коэффициент «2» учитывает необходимость проведения не менее двух информационных обменов с одним модулем, например для получения оперативной и неоперативной составляющей информации. При отсутствии причин для передачи информации q=0; значение q существенно увеличивается при фиксации нештатной ситуации. Так как оперативность системы телемеханики играет решающую роль именно в нештатных ситуациях, целесообразно определять динамические параметры системы при увеличении интенсивности потока заявок на передачу информации по каналам связи.
Рассмотрим случай, когда однократно переданное сообщение не принимается приемником ПУ. Тогда имеем:
ti = T1 + 2(T2 + 2T3 + T4). (2)
Максимальное значение T1 равно tинфi, так как в самом неблагоприятном случае необходимость в передаче нового сообщения возникает сразу после начала передачи ранее сформированного. Примем:
T1=0,5ti. (3)
В соответствии со структурой сообщений БП запрос представляется сообщением длиной в 8 байт, поэтому (без учета дополнительных бит байта со структурой FT1-2)
T2=![]() , (4)
, (4)
где fт - тактовая частота передачи.
Задержка реакции КП на команду от ПУ может быть оценена величиной
T3 = 0,5T2=![]() . (5)
. (5)
При условии передачи сообщения, включающего данные двух «событий», сопровождаемых семибайтными метками времени, имеем
T4= ![]() . (6)
. (6)
Тогда
ti = 0,5 ti +2(![]() +2
+2 ![]() +
+ ![]() )=
)=![]() . (7)
. (7)
Преобразуем (1) в вид:
TПЕР =![]() = Кпnti =
= Кпnti = ![]() , (8)
, (8)
где Кп - усредненная вероятность того, что необходимость передачи информации по каналу связи возникает после проведения одного цикла ввода в контроллер информации от всех n модулей. Число буферов передачи S определяется с учетом максимально допустимой величины задержки tmax между моментами фиксации события и его привязки к метке времени в центральном контроллере КП по формуле:
S ≥ ![]() . (9)
. (9)
При n=16, fт=9600 бит/с, tmax=10 мс, получим
S ≥ 250Кпер . (10)
Из (10) видно, что устройство КП, содержащее один буфер передачи, практически неработоспособно. Определим необходимые условия для того, чтобы даже при использовании достаточного числа буферов передачи информации обеспечить требуемое значение tmax.
Выше указывалось, что параметром, характеризующим оперативность SCADA, является точность привязки «событий» к меткам времени. Как указывалось, при реализации БП, как правило, используется централизованный метод формирования информационных сообщений. Данные от всех модулей устройства периодически вводятся в общий контроллер, который анализирует весь объем полученной информации и, по заданным критериям, формирует одно или несколько информационных сообщений для передачи в ПУ или в устройство ретрансляции. Рассмотрим модель формирования информационного сообщения с привязкой «событий» к меткам времени, представленную на рис. 2.
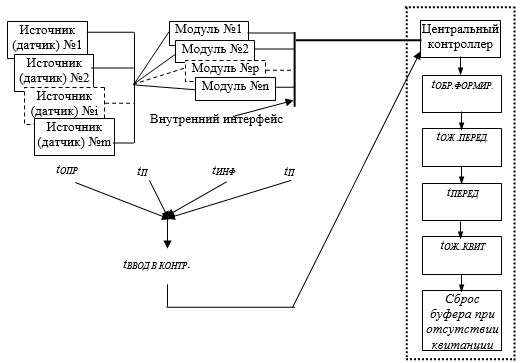
Рис. 2. Модель формирования информационного сообщения.
Примем следующие исходные данные: устройство КП строится по «сосредоточенному» принципу, т.е. не разделяется на части, максимально приближенные к источникам и приемникам информации; число модулей, подключенных к общему контроллеру, равно n; контроллер считывает информацию модулей циклически; для получения данных от одного модуля в среднем требуется проведение двух информационных обменов с контроллером; максимальный временной сдвиг между «событием», зафиксированным любым модулем, и временем регистрации «события» в контроллере, не должен превышать tmax; для передачи информации в контроллере используется один буфер.
На рис. 2 показано, что для ввода информации «m» источников в устройство КП устанавливается «n» модулей, т.е. в приведенном примере в среднем ![]() источников (датчиков) подключается к одному модулю. Если все модули обладают одинаковой производительностью, можно определить усредненное время, затрачиваемое модулем на ввод новой информации. При работе модулей без накопления информации и без привязки полученной от источников информации к меткам времени время ввода новой информации (tввод) является одной из составляющих погрешности формирования метки времени. Введенная в модули информация периодически, по командам от контроллера, выводится из модулей и заносится в базу текущих данных контроллера.
источников (датчиков) подключается к одному модулю. Если все модули обладают одинаковой производительностью, можно определить усредненное время, затрачиваемое модулем на ввод новой информации. При работе модулей без накопления информации и без привязки полученной от источников информации к меткам времени время ввода новой информации (tввод) является одной из составляющих погрешности формирования метки времени. Введенная в модули информация периодически, по командам от контроллера, выводится из модулей и заносится в базу текущих данных контроллера.
Временные составляющие, характеризующие ввод информации в контроллер: tопр - время передачи от контроллера команды опроса информации выбранного модуля; tп – пауза между подачей команды опроса и подготовкой данных модулем, а также между приемом информации от ранее выбранного модуля и подачей команды опроса данных очередного модуля; tинф – время ввода информации модуля в контроллер. Введенная в контроллер информация обрабатывается для выявления «событий», после чего «событие» привязывается к метке времени (системному или астрономическому времени, хранимому в контроллере). Максимальное суммарное время от появления «события» до момента его привязки к метке времени tmax не должно превышать установленное (допустимое) значение, например 10 мс. Тогда
tmax≥ tввод+2n(tопр+tп+tинф +tп)+Кtобр , (11)
где tобр – время обработки контроллером данных одного объекта; К – коэффициент, которым учитывается общее число объектов контроля и обработки. Очевидно, что 0≤ К≤ m.
К∙ tобр соответствует временному сдвигу между началом очередного цикла обработки полученной контроллером информации и обработкой данных объекта, чье состояние изменилось. Для оценки исследуемого параметра примем К = 0,5m.
Очевидно, что при использовании помехозащитных процедур при вводе информации от источников и соответствующей обработки получаемой информации tввод окажется больше указанного допустимого значения погрешности. Поэтому в рассматриваемой структуре формирования информационных сообщений функции модуля ограничиваются процедурами сканирования сигналов от датчиков, запоминания полученной информации и трансляции данных в контроллер при получении от него команды опроса. При таком построении модулей величина tввод может быть не более нескольких миллисекунд. В то же время ясно, что для согласования динамики ввода данных от датчиков и вывода информации из модуля должно соблюдаться соотношение:
2n(tопр+ tп+ tинф + tп) ≥ tввод ≥ 0,5∙2n(tопр+ tп+ tинф + tп). (12)
Примем
tввод = 0,7∙2n(tопр+ tп+ tинф+ tп) . (13)
Тогда (13) можно представить в виде
tmax≥.3,4n(tопр+ tп+ tинф +tп)+0,5mtобр . (14)
Проанализируем данные для следующих «усредненных» условий работы устройства КП: число модулей, включенных в состав одного устройства КП, равно восьми; команда опроса данных одного модуля включает трехбайтное сообщение; пауза между смежными передачами по внутреннему интерфейсу устройства КП равна половине времени передачи команды опроса; одно информационное сообщение от модуля состоит из восьми байт и включает данные восьми объектов; тактовая частота информационного обмена по внутреннему интерфейсу равна fТ; tmax =10-2с.
Обозначим 0,5mtобр = Tобр и построим зависимость fТ=F(Tобр) для приведенных данных (рис. 3).
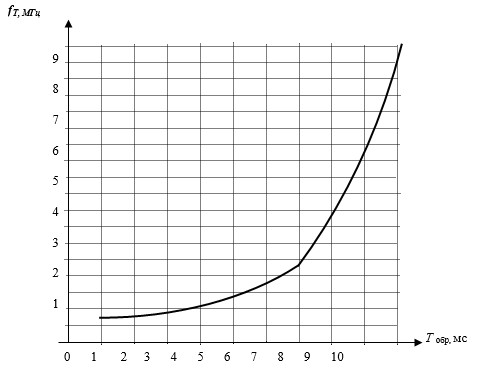
Рис. 3. Зависимость требуемой оперативности ввода данных в контроллер от времени их обработки.
Из графика видно, что для реализации БП в устройствах КП (с заданными в примере характеристиками) необходимо использовать внутренние интерфейсы с частотой тактовых сигналов не ниже 1…2 МГц. Контроллер КП должен обработать массив данных, принятых от всех модулей, за 3…6 мс. Выполнение столь жестких требований неизбежно приведет к снижению помехоустойчивости и достоверности данных и практической невозможности выполнения устройства КП для больших объемов информации или при повышении интенсивности потока данных, т.е. при работе в нештатных ситуациях.
Описываемая реализация БП – формирование всех компонентов рабочего цикла в общем (для всех модулей) контроллере, приводит к практической незащищенности поступающей в контроллер информации от помех в цепях связи модулей с датчиками. Отмеченный недостаток характерен не только для «традиционных» датчиков, но и для каналов телесигнализации, которые связаны с устройствами защиты и автоматики, регистраторами. Анализ работы других каналов систем телемеханики существенно не изменяет выводы, сделанные выше [4].
Рецензенты:
Лисов О.И., д.т.н., профессор кафедры «Информатика и программное обеспечение вычислительных систем» Национального исследовательского университета «МИЭТ», г. Москва;
Гагарина Л.Г., д.т.н., профессор, зав. кафедрой «Информатика и программное обеспечение вычислительных систем» Национального исследовательского университета «МИЭТ», г. Москва.
Библиографическая ссылка
Баин А.М., Каунг С..., Портнов Е.М., Слюсарь В.В., Чжо З.Л. МЕТОДИКА ПОВЫШЕНИЯ ОПЕРАТИВНОСТИ СИСТЕМ SCADA ПРИ ИСПОЛЬЗОВАНИИ ПРОТОКОЛА МЭК 870-5-101 // Современные проблемы науки и образования. – 2015. – № 2-1. ;URL: https://science-education.ru/ru/article/view?id=21221 (дата обращения: 25.04.2024).