



Программный проект «Информационное обеспечение» Федеральной целевой программы «Модернизация транспортной системы России» (№ 848 от 5 декабря 2001 г.), «Концепция формирования и развития единого информационного пространства России и соответствующих государственных информационных ресурсов», ФЦП «Электронная Россия» и ряд других программ, принятых в Российской Федерации, ставят перед дорожной отраслью задачи по созданию единого информационного пространства в целях совершенствования системы принятия управленческих решений по контролю взаимодействия транспортных потоков, транспортно-эксплуатационных качеств дорог, эффективного использования научно-технического потенциала [5].
В 2004 г. авторами была создана программа моделирования процесса функционирования лесовозной автомобильной дороги в системе автоматизированного проектирования. В настоящее время модернизирован модуль ПОТОК и создан дополнительный модуль «ВОДИТЕЛЬ».
Теоретический анализ. Оптимизация проектных решений по комплексу показателей требует оценки по их результатам моделирования процесса функционирования дороги при пропуске автомобильных потоков расчетного состава и интенсивности. Основное внимание обращено на следующие особенности этой части имитационной подсистемы: во-первых, комплекс показателей имитируемого процесса функционирования дороги должен отражать все варианты параметров дороги при поисках оптимального проектного решения. Это может быть достигнуто только детальным представлением в исходных данных параметров проектных решений; во-вторых, непрерывное изменение от пикета к пикету проектируемых характеристик дороги создает по каждому варианту последовательность дорожных условий, формирующих режимы движения, присущие только данному участку дороги, данному варианту.
Введение классификации, разделяющей дорожные условия на три типа в зависимости от режима движения потока автомобилей, позволяет разработать единый алгоритм моделирования движения потока при любом сочетании элементов дороги и обстановки пути.
В-третьих, это особенно важно для двухполосных дорог (II, III, IV категорий), полная оценка проектного решения требует совместного моделирования движения потоков прямого и встречного направлений. Улучшение показателей потока прямого направления соответствующим проектированием дорожных условий может ухудшить показатели встречного потока. В процессе движения происходит непрерывное взаимодействие потоков, причем результаты такого взаимодействия проявляются и на прилегающих участках дороги. Чтобы оценить условия движения, допустим, на 10-м пикете, нужно знать показатели движения потока прямого направления на 9-м, 8-м, 7-м и так далее пикетах и показатели движения встречного потока на 10-м пикете, нужно знать показатели его движения на 11-м, 12-м, 13-м и так далее пикетах и показатели движения прямого потока на 10-м пикете. Получается замкнутый круг, который разрешен в программе ПОТОК соответствующим алгоритмом итерационного моделирования, позволяющим за 2–3 итерации быстро достичь установившиеся (по итерациям) характеристики обоих потоков. Каждая итерация заключается в «прогонке» программ моделирования по участку дороги в прямом и обратном направлениях. При каждой итерации уточняются характеристики режимов движения на каждом пикете прямого направления, которые служат данными для моделирования обратного направления движения. При первой «прогонке» характеристики встречного потока вычисляются по эмпирическим формулам [6–8].
В-четвертых, поскольку движение автомобилей является случайным процессом, показатели этого движения в целом по участку дороги и, что особенно важно для оптимизации проектных решений, попикетные показатели должны быть получены как результат моделирования случайного процесса (рис. 1). Поэтому в алгоритме программы решены следующие задачи: моделирование попикетного распределения скорости свободного движения типовых автомобилей (по результатам попикетного расчета параметров распределения скорости и дисперсии); установление режима движения потока на каждом пикете в соответствии с дорожными условиями (стационарный, переходные); расчет функций распределения скорости типовых автомобилей в потоке на каждом пикете (необходимые для этого моделирования распределения интервалов, расчет возможности обгона, вероятности свободного движения и т.д.); расчет показателей движения автомобилей в потоке, необходимых для оценки проектного решения (скорости автомобилей типовых групп, коэффициент безопасности, составляющие себестоимости перевозок, расход топлива, эмиссию токсичных веществ и т.п.).
Методика. Данными для программы ПОТОК служат результаты работы программы ПРОФИЛЬ, СОСТАВ, ТРАССА, находящиеся в рабочем файле, и данные, необходимые для технико-экономических расчетов.
Данные программы ПРОФИЛЬ: массив средних значений уклонов на пикетах, массив расстояний видимости встречного автомобиля, данные о плане и продольном профиле. Данные программы ТРАССА: попикетные значения средних значений свободного движения и дисперсии скорости, расхода топлива, эмиссии токсичных веществ, основных типовых автомобилей; попикетные значения классификации дорожных условий по возможности обгона; данные о проезжей части и об обстановке в пути. Данные для технико-экономических расчетов: интенсивность потоков в расчетном году; календарный и расчетный годы [2, 13].
Результаты работы программы ПОТОК выводятся в различном виде в зависимости от управляющих параметров режима ввода. Средние значения для каждого направления: скорость и время движения, расход топлива, эмиссия токсичных веществ, приведенные к СО; сводка затрат на перевозки в целом и по видам затрат в сутки и в расчетном году для каждого направления; эпюры скорости основных типов автомобилей в потоке, совмещенные с коэффициентом безопасности; средние значения для каждого направления и для каждого типового автомобиля: скорости, времени движения, расхода топлива, эмиссии токсичных веществ, затрат на перевозки в целом и по видам затрат; попикетные значения для каждого автомобиля: скорости, расхода топлива, себестоимости перевозок в целом и по видам затрат, эмиссии токсичных веществ; распределение скорости свободного движения и в потоке [5, 12].

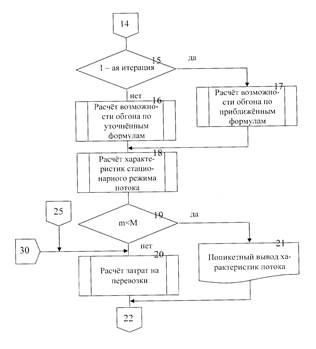
Рис. 1. результат моделирования случайного процесса
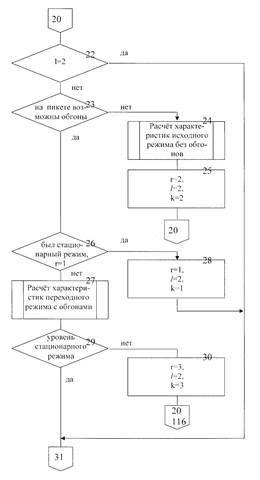
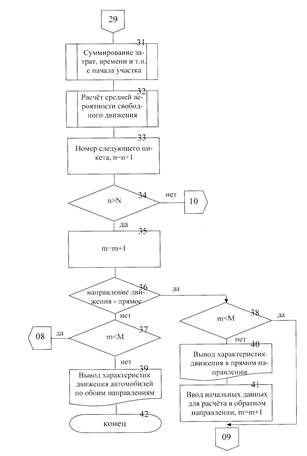
Рис. 2. Блок-схема программы ПОТОК
Попикетные значения в среднем для потока: распределение скорости свободного движения; распределение скорости автомобилей в потоке; распределение интервалов между автомобилями; вероятности обгонов; тип режима движения потока; плотность потока и его средняя скорость [3].
Разработанная программа «ВОДИТЕЛЬ» выполняет оценку надежности водителя по интегральному показателю, включающему расход топлива, безопасность, равномерность движения. Один из модулей программы (рис. 3) выполняет управление дорожным движением на двухполосной дороге с учетом обгонов и отслеживанием возможных аварийных ситуаций.
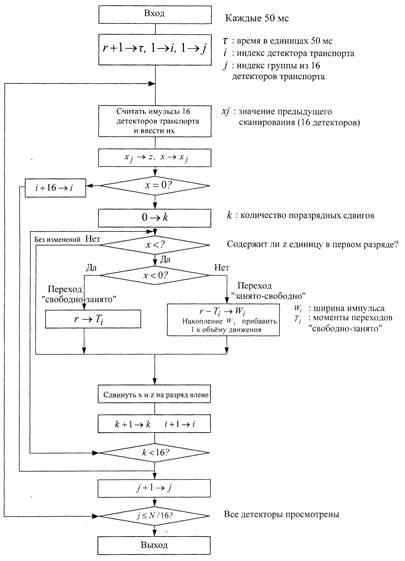
Рис. 3. Модуль сканирования информации, полученной с детекторов транспорта программы «ВОДИТЕЛЬ»
Предложены критерии оценки профмастерства водителей лесовозных автотранспортных средств, а именно безопасность, производительность, экономичность, позволяющие на основании данных бортовой регистрирующей аппаратуры производить расчеты как частных оценочных показателей работы водителей, так и интегрального показателя, характеризующего профмастерство водителя в целом [5].
Для характеристики мастерства водителя в целом применяется интегральный показатель
![]() , (1)
, (1)
где ![]() — показатель, характеризующий безопасность управления транспортным средством (ТС), оцениваемый безошибочностью работы водителя, степенью равномерности движения по продольной и поперечной осям автопоезда;
— показатель, характеризующий безопасность управления транспортным средством (ТС), оцениваемый безошибочностью работы водителя, степенью равномерности движения по продольной и поперечной осям автопоезда; ![]() — показатель производительности перевозок, оцениваемый средней скоростью движения автопоезда;
— показатель производительности перевозок, оцениваемый средней скоростью движения автопоезда; ![]() — совокупный показатель оценки мастерства управления ТС с точки зрения экономичности, оцениваемый равномерностью работы двигателя, расходом топлива за время движения, точностью пользования коробкой передач;
— совокупный показатель оценки мастерства управления ТС с точки зрения экономичности, оцениваемый равномерностью работы двигателя, расходом топлива за время движения, точностью пользования коробкой передач; ![]() — показатель оценки поведения водителя в экстремальных ситуациях, определяемый при тестировании испытуемого с помощью автоматизированного комплекса.
— показатель оценки поведения водителя в экстремальных ситуациях, определяемый при тестировании испытуемого с помощью автоматизированного комплекса.
Учитывается не только количество совершенных водителем ошибочных действий, но и степень их опасности, характеризующаяся уровнем самой ошибки и объемом ее действия
 , (2)
, (2)
где ![]() показатель безошибочности работы водителя;
показатель безошибочности работы водителя; ![]() складывается из частных показателей ошибочного выполнения отдельных операций транспортного процесса:
складывается из частных показателей ошибочного выполнения отдельных операций транспортного процесса:  где
где ![]() ,
, ![]() — объем ошибочных действий при выполнении разгонов и торможений и поперечных маневров соответственно, определяются
— объем ошибочных действий при выполнении разгонов и торможений и поперечных маневров соответственно, определяются  , где
, где ![]() — количество неверно выполненных разгонов, торможений и поперечных маневров;
— количество неверно выполненных разгонов, торможений и поперечных маневров;  — общая продолжительность движения ТС с продольными и поперечными ускорениями;
— общая продолжительность движения ТС с продольными и поперечными ускорениями;  — сумма интегралов от кривых
— сумма интегралов от кривых ![]() по времени;
по времени;  — объем превышений разрешенной скорости движения;
— объем превышений разрешенной скорости движения;  — общая продолжительность движения ТС с превышением разрешенной скорости.
— общая продолжительность движения ТС с превышением разрешенной скорости.
Степень равномерности движения по продольной оси представляет степень отклонения мгновенной скорости движения от ее среднего значения  , (3).
, (3).
Степень равномерности движения по поперечной оси представляет степень отклонения мгновенных значений центробежного ускорения от его порогового значения
 , (4)
, (4)
где ![]() — число циклов «трогание—остановка» автопоезда;
— число циклов «трогание—остановка» автопоезда; ![]() — количество поворотов на маршруте;
— количество поворотов на маршруте; ![]() — пороговое значение центробежного ускорения.
— пороговое значение центробежного ускорения.
Производительность перевозок оценивается полезной работой, совершенной автопоездом в единицу времени [4]
 , (5)
, (5)
где ![]() — величина средней скорости движения, достигнутая на маршруте испытуемым водителем;
— величина средней скорости движения, достигнутая на маршруте испытуемым водителем; ![]() — базовая величина средней скорости движения транспортного средства.
— базовая величина средней скорости движения транспортного средства.
Совокупный показатель оценки мастерства управления ТС с точки зрения экономичности
 , (6)
, (6)
где  — показатель оценки степени равномерности работы двигателя;
— показатель оценки степени равномерности работы двигателя;  — безразмерный показатель оценки степени правильности пользования коробкой передач;
— безразмерный показатель оценки степени правильности пользования коробкой передач;  — показатель экономичности управления ТС по расходу топлива.
— показатель экономичности управления ТС по расходу топлива.
Выделены основные принципы оценки поведения водителей в экстремальных условиях: быстрая адаптация к различным уровням деятельности, интегральная оценка статуса испытуемого, прогноз пригодности к управлению ТС в любых условиях и при любых видах перевозок. С целью классификации каждого испытуемого в векторном представлении изображали вектором или точкой х-х (х1, х2, …, х62) в 62-мерном векторном пространстве признаков х. Затем был оценен полученный в результате обследования водителей исходный материал методом линейного факторного анализа [9–11].
Результаты. Увязывая многообразие проектных решений отдельных частей дороги, описанная программа позволяет видеть всю дорогу «в целом», оценивать возможно полнее транспортно-эксплуатационные показатели выбираемого проектного решения, анализировать и синтезировать конструкцию дороги в режиме диалога с ЭВМ, видеть дорогу в действии. Моделирование дорожного движения такой системой – это испытание конструкций дороги на ЭВМ.
Рецензенты:
Афоничев Д.Н., д.т.н., заведующий кафедрой электротехники и автоматики ФГБОУ ВПО «Воронежский государственный аграрный университет имени императора Петра I», г. Воронеж;
Астанин В.К., д.т.н., профессор, заведующий кафедрой технического сервиса и технологии машиностроения ФГБОУ ВПО «Воронежский государственный аграрный университет имени императора Петра I», г. Воронеж.
Библиографическая ссылка
Козлов В.Г., Кондрашова Е.В., Скрыпников А.В., Скворцова Т.В. МОДЕЛИРОВАНИЕ ТРАНСПОРТНОГО ПОТОКА НА ЛЕСОВОЗНЫХ АВТОМОБИЛЬНЫХ ДОРОГАХ // Современные проблемы науки и образования. – 2015. – № 1-1. ;URL: https://science-education.ru/ru/article/view?id=19650 (дата обращения: 19.04.2024).