



В некоторых случаях, как, например, в работе [5], минимизировать затраты энергии предлагается путем добавления специальных элементов в конструкцию привода. Автор предлагает ввести между исполнительным механизмом и нагрузкой упругие связи. Это позволяет повысить энергетическую эффективность, но негативно сказывается на динамических характеристиках привода.
В работе [3] рассматривается алгоритмический способ минимизации затрачиваемой энергии. Авторы исследуют энергоэффективность электромеханического привода в режиме работы «от точки к точке» (англ. “pointtopoint”, “PTP”). Под данным режимом как раз подразумевается поворот выходного звена привода на некоторый угол по заданной траектории. Авторы анализируют влияние формы траектории и времени поворота на величину затрачиваемой при движении энергии.
В данной статье предлагается рассмотреть условия, которые помогут минимизировать затраты энергии при работе электрогидравлического привода в динамическом режиме.
Анализ проводится для электрогидравлического привода, схема которого представлена на рисунке 1.
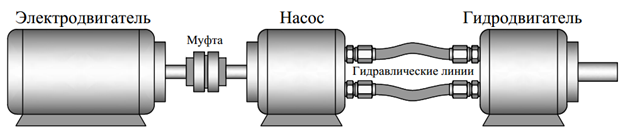
Рис.1. Схема электрогидравлического привода
Управление приводом осуществляется путем непосредственного регулирования скорости вращения вала насоса при помощи индукторного электродвигателя. Исполнительный механизм представляет собой поворотный гидродвигатель. Такую систему можно использовать, например, для привода звена манипулятора, поворачивающегося на заданный угол. В этом случае режим работы «разгон-торможение» является для него основным.
Цель данной статьи – анализ влияния формы фронта управляющего сигнала и времени выхода на заданный угол на энергетическую эффективность электрогидравлического привода.
Схожая проблема рассматривается в работе [2], однако в ней рассматривается установившийся режим работы привода.
Для оценки энергоэффективности привода на различных режимах работы нужно составить его математическую модель.
Расчетная схема математической модели приведена на рисунке2.
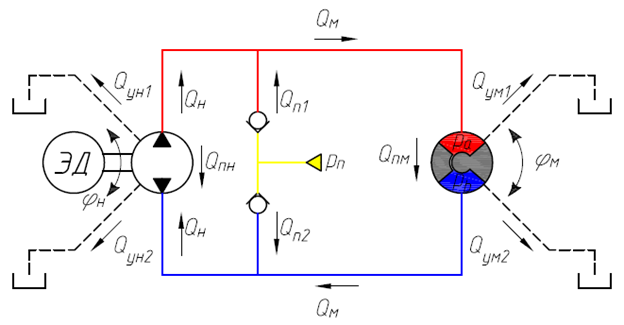
Рис.2. Расчетная схема математической модели
Систему можно условно разделить на две части: гидромеханическая, в которую входят насос и гидродвигатель, и электромеханическая, в которую входят электродвигатель и регулятор.
Описание гидромеханической части системы.
Скорость нарастания давления в каждой из полостей гидродвигателя пропорциональна алгебраической сумме втекающих и вытекающих расходов.
![]()
![]()
где ![]() –
давление в полости “A”,
–
давление в полости “A”,
![]() –
давление в полости “B”,
–
давление в полости “B”,
![]() –
модуль упругости жидкости,
–
модуль упругости жидкости,
![]() –
объем жидкости в полости “A” вместе с присоединенными
трубопроводами,
–
объем жидкости в полости “A” вместе с присоединенными
трубопроводами,
![]() –
объем жидкости в полости “B” вместе с присоединенными трубопроводами,
–
объем жидкости в полости “B” вместе с присоединенными трубопроводами,
![]() –
подача насоса,
–
подача насоса,
![]() –
расход жидкости в гидромотор,
–
расход жидкости в гидромотор,
![]() и
и
![]() –
расходы подпитки в линии “A” и “B”,
–
расходы подпитки в линии “A” и “B”,
![]() –
перетечки рабочей жидкости в насосе,
–
перетечки рабочей жидкости в насосе,
![]() –
перетечки рабочей жидкости в гидродвигателе,
–
перетечки рабочей жидкости в гидродвигателе,
![]() –
утечки рабочей жидкости в насосе из линии высокого давления,
–
утечки рабочей жидкости в насосе из линии высокого давления,
![]() –
утечки рабочей жидкости в насосе из линии низкого давления,
–
утечки рабочей жидкости в насосе из линии низкого давления,
![]() –
утечки рабочей жидкости в гидродвигателе из линии высокого давления,
–
утечки рабочей жидкости в гидродвигателе из линии высокого давления,
![]() –
утечки рабочей жидкости в гидродвигателе из линии низкого давления.
–
утечки рабочей жидкости в гидродвигателе из линии низкого давления.
Перечисленные выше расходы рассчитываются следующим образом:
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
где ![]() ,
,
![]() ,
,
![]() ,
,
![]() ,
,
![]() ,
,
![]() –
коэффициенты утечек, перетечек и проводимости подпиточных клапанов,
–
коэффициенты утечек, перетечек и проводимости подпиточных клапанов,
![]() –
рабочий объем насоса,
–
рабочий объем насоса,
![]() –
рабочий объем гидродвигателя,
–
рабочий объем гидродвигателя,
![]() –
скорость вращения вала насоса,
–
скорость вращения вала насоса,
![]() –
скорость вращения вала гидродвигателя.
–
скорость вращения вала гидродвигателя.
Уравнение движения выходного звена, соединенного с валом гидродвигателя.
![]()
где ![]() –
угол поворота вала гидродвигателя,
–
угол поворота вала гидродвигателя,
![]() –
момент инерции нагрузки,
–
момент инерции нагрузки,
![]() –
внешний момент, нагружающий выходное звено,
–
внешний момент, нагружающий выходное звено,
![]() –
момент, развиваемый гидродвигателем,
–
момент, развиваемый гидродвигателем,
![]()
где ![]() –
коэффициент вязкого трения в гидродвигателе.
–
коэффициент вязкого трения в гидродвигателе.
Уравнение движения ротора электродвигателя вместе с приведенной инерцией вращающихся частей насоса.
![]()
где ![]() –
угол поворота вала насоса,
–
угол поворота вала насоса,
![]() –
момент, развиваемый электродвигателем,
–
момент, развиваемый электродвигателем,
![]() –
момент на валу насоса,
–
момент на валу насоса,
![]() –
момент от сил трения в электродвигателе.
–
момент от сил трения в электродвигателе.
Описание электрической части системы.
Уравнения, описывающие электродвигатель, а также значения параметров содержатся в [4].
Ток в обмотках электродвигателя вычисляется с учетом активного сопротивления, индуктивности обмоток и противо-ЭДС.
![]()
где ![]() –
ток в обмотках электродвигателя,
–
ток в обмотках электродвигателя,
![]() –
активное сопротивление обмоток электродвигателя,
–
активное сопротивление обмоток электродвигателя,
![]() –
коэффициент противо-ЭДС,
–
коэффициент противо-ЭДС,
![]() –
индуктивность обмоток электродвигателя,
–
индуктивность обмоток электродвигателя,
![]() –
напряжение, соответствующее сигналу рассогласования.
–
напряжение, соответствующее сигналу рассогласования.
Момент, развиваемый электродвигателем:
![]()
где ![]() –
коэффициент, связывающий момент и ток.
–
коэффициент, связывающий момент и ток.
Для корректировки динамических свойств
системы применен ПИД-регулятор. Вычисление напряжения рассогласования ![]() производится
следующим образом:
производится
следующим образом:
![]()
где ![]() ,
,
![]() ,
,
![]() –
коэффициенты настройки регулятора,
–
коэффициенты настройки регулятора,
![]() –
заданный угол поворота выходного звена, соединенного с валом гидродвигателя.
–
заданный угол поворота выходного звена, соединенного с валом гидродвигателя.
В модели учтен факт ограничения напряжения источника питания:
![]()
Численные значения величин, описанных выше, приведены в таблице 1.
Таблица 1
Численные значения параметров математической модели
|
Параметр |
Значение |
Размерность |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1.0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|

В ходе проведения численного эксперимента входным сигналом системы был желаемый угол поворота выходного вала гидродвигателя. Его максимальная величина 45̊. Для анализа влияния формы фронта было рассмотрено два вида сигнала: кусочно-линейный и синусоидальный. Вид входных сигналов показан на рисунке3.
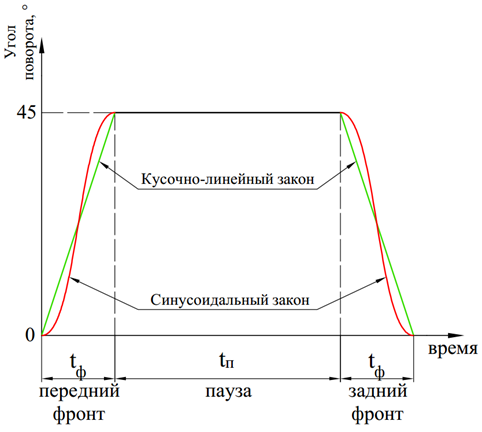
Во время паузы привод отключен, поэтому его можно в расчетах не учитывать. Тогда закон можно сформировать только из переднего и заднего фронта с периодом T=2tф. По результатам моделирования получены зависимости энергии, затраченной на один цикл поворота выходного звена на 45̊ и обратно за время T=2tф. Графики зависимостей показаны на рисунке 4.
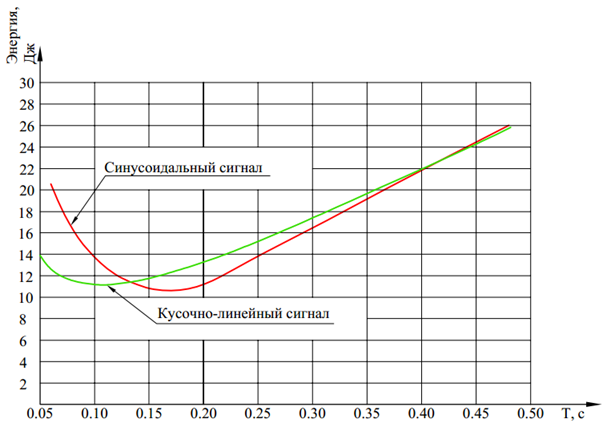
Рис.4. Влияние формы сигнала на затраты энергии
Параллельно с численным экспериментом проводился физический. В виду отсутствия на момент его проведения гидродвигателя, вместо него использовалось нагружающее устройство в виде дросселя, создающего давление аналогичное тому, что возникает в полостях гидродвигателя.
Результаты численного и физического эксперимента для синусоидального входного сигнала представлены на рисунке 5.
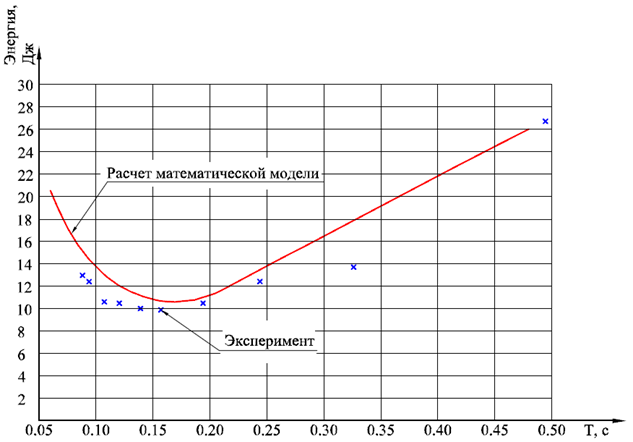
Рис.5. Сравнение результатов численного и физического эксперимента
Анализируя полученные результаты, можно сделать некоторые полезные для практического применения выводы.
Существует оптимальный с точки зрения затрат энергии закон движения выходного звена. Этот закон определяется временем выхода на заданный угол и формой фронта управляющего сигнала. При одном и той же фронте можно ограничиться оптимальным временем Топт выхода в заданное положение. Если осуществлять движение быстрее, чем за время Топт, то затраты энергии будут главным образом определяться разгоном движущихся масс. Если осуществлять движение дольше, чем за время Топт, то затраты энергии будут определяться диссипативными факторами (такими как трение, утечка жидкости), а разгонные процессы к этому моменту уже завершатся.
Некоторое различие результатов численного и физического эксперимента нужно объяснить отсутствием во втором случае утечек жидкости в нагружающем устройстве.
В каждом конкретном случае применения электрогидравлического привода необходимо отдельно рассматривать влияние внешних нагрузок и формы фронта управляющего сигнала на время Топт. Судя по полученным результатам, учет этого факта может до двух раз повысить энергоэффективность привода.
В дальнейшей работе представляется целесообразным параметризировать форму фронта сигнала и провести процедуру оптимизации по критерию минимума затраченной энергии.
Рецензенты:Шумилов И.С., д.т.н., профессор, ФГБОУ ВПО Московский государственный технический университет имени Н.Э. Баумана, г.Москва;
ВельтищевВ.В., д.т.н., заведующий кафедрой «Подводные роботы и аппараты», ФГБОУ ВПО Московский государственный технический университет имени Н.Э. Баумана, г.Москва.
Библиографическая ссылка
Семенов С.Е., Щербачев П.В., Тарасов О.И. ЭНЕРГОЭФФЕКТИВНОСТЬ ЭЛЕКТРОГИДРАВЛИЧЕСКОГО ПРИВОДА В ДИНАМИЧЕСКОМ РЕЖИМЕ // Современные проблемы науки и образования. – 2014. – № 6. ;URL: https://science-education.ru/ru/article/view?id=16374 (дата обращения: 25.04.2024).