



Робототехника стремительно развивается в направлении водных средств [1], [2], [3]. Автономные мини-корабли способны обеспечить длительную работу в водной среде. Таким образом, автономные мини-корабли могут быть полезны для таких задач, как мониторинг окружающей среды, дикой жизни, поиск и спасательные операции.
Схема использования автономного мини-корабля заключается в следующем: сначала оператор пункта управления визуально на карте строит миссию, состоящую из сегментов (как показано на рисунке 6),а система управления вычисляет необходимые управления (силы, моменты и уставки приводов) для выполнения данной миссии.
Задача заключается в построении системы навигации и управления мини-корабли для автономного выполнения данной миссии.
В данной статье приведены как практические детали, связанные с архитектурой аппаратного и программного обеспечения, так и результаты экспериментов.
Статья организована следующим образом. Вначале описана архитектура аппаратного обеспечения системы управления и навигации автономного мини-корабля. Далее представлен алгоритм управления, после чего описана архитектура программного обеспечения. За этим следуют результаты нескольких экспериментов и некоторые выводы и планы дальнейших работ.
Архитектура аппаратного обеспечения системы управления и навигации автономного мини-корабля
Структура аппаратного обеспечения системы управления и навигации автономного мини-корабля показана на рисунке 1.При разработке использована парадигма разделения вычислительной части на высокоуровневую(компьютер) и низкоуровневую (микроконтроллерный блок). Микроконтроллерный блок получает данные от компьютера или пульта дистанционного управления и генерирует ШИМ-сигнал для управления двигателями и сервоприводами. Компьютер вычисляет требуемые управляющие воздействий в соответствии с алгоритмом управления, выполняет программное обеспечение навигационной системы, и обменивается данными с наземным пунктом управления.
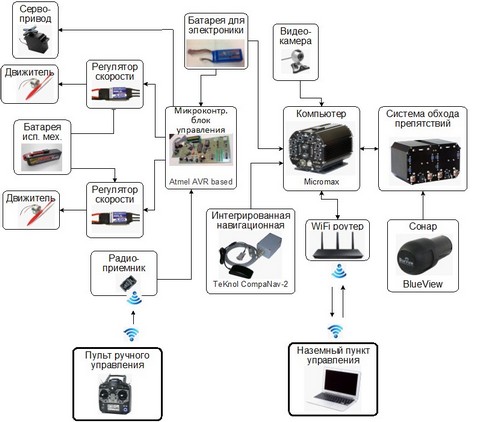
Рисунок 1. Аппаратная реализация автономного мини-корабля
Автономный мини-корабль и наземный пункт управления показан на рисунке 2
 а)
а)  б)
б)  в)
в)
Рисунок 2. Внешний вид разработанного комплекса: а) автономный мини-корабль; б) наземный пункт управления; в) задание миссии мини-корабля
Пункт управления может использоваться как для задания миссии мини-корабля путем прокладки маршрута на карте, так и для управления кораблем в ручном режиме.
Алгоритм управления
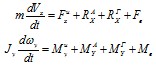
Математическая модель автономного мини-корабля в соответствии с результатами, полученными в [1], имеет следующий вид:
 (1)
(1)
 , (2)
, (2)
где m– масса мини-корабля; Vx – продольная скорость мини-корабля;  – гидро- и аэродинамические силы и моменты; Jy–момент инерции вокруг оси Y; ωy - угловая скорость вокруг оси Y;
– гидро- и аэродинамические силы и моменты; Jy–момент инерции вокруг оси Y; ωy - угловая скорость вокруг оси Y;  – управляющие сила и момент, создаваемые посредством движителей и поворотного устройства;
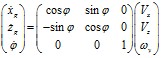
– управляющие сила и момент, создаваемые посредством движителей и поворотного устройства;  –производные координат центра масс мини-корабля в земной системе координат;
–производные координат центра масс мини-корабля в земной системе координат; –производная угла ориентации мини-корабля в земной системе координат.
–производная угла ориентации мини-корабля в земной системе координат.
Следующий алгоритм автопилота был разработан на основе методики, описанной в [2, 3, 4, 5] для математической модели (1, 2):
 , (3)
, (3)
где ; Т1, Т2, Т3 –постоянные времени;
; Т1, Т2, Т3 –постоянные времени;  –оценки внешних возмущений.
–оценки внешних возмущений.
Для оценки внешних возмущений в соответствии с [2] синтезирован следующий наблюдатель:
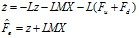 , (4)
, (4)
где – коэффициенты настройки наблюдателя.
– коэффициенты настройки наблюдателя.
Алгоритм управления вычисляет управляющие продольную силу и момент относительно оси ординат Y: Fux, Muy.
Для реализации управляющих сил и моментов нужно распределить эти управления на приводы.
Рассматриваемый автономный мини-корабль имеет два движителя, работающих синхронно, и поворотное устройство, позволяющий управлять вектором тяги, как показано на рисунке 3. Таким образом, доступные каналы управления: ШИМ-сигнал управления движителями и ШИМ-сигнал управления сервоприводом поворотного устройства.

Рисунок 3. Исполнительные механизмы автономного мини-корабля
Для преобразования вектора управлений Fu= [Fux, Muy] T в уставки исполнительных механизмов используются следующие формулы:
Fuz = Muy/k
Fu = sqrt(Fux*Fux+Fuz*Fuz)
α= -atan2(Fuz,Fux),
где Fuz– проекция управляющей силы на поперечную ось координат, которая создает управляющий момент, Fu– модуль управляющей силы, α– угол поворота вектора тяги для создания проекций Fux и Fuz.
Т.к. двигатели и их регуляторы, которые поставляются как готовые продукты, имеют нелинейную характеристику зависимости генерируется тяги от ШИМ-сигнала, для адекватного управления нужно построить зависимость тяги от ШИМ-сигнала. Для этого с использованием динамометр были выполнены замеры тяги для нескольких ШИМ-сигналов во всем их диапазоне. В результате получен следующий полином, аппроксимирующий зависимость между тягой и ШИМ-сигналом:
PWMspeed = p1*Fu2+ p2*Fu+ p3,
где p1= -0.005466,p2 = 1.014,p3 = 254.3 – коэффициенты полинома, рассчитанные посредством классического регрессионного анализа.
Аналогично, выражения для зависимости угла поворота вектора тяги и ШИМ-сигнала управления сервоприводом имеет вид:
PWMangle = p4*α+ p5,
где p4 = 216.6, p5 = 336, α задан в градусах.
Программная реализация системы управления
В качестве операционной системы бортового компьютера используется UbuntuLinux. Программное обеспечение построено на базе Robot Operating System, что позволяет реализовать слабую связанность компонентов и клиент- серверный шаблон их взаимодействия. Структура программного обеспечения системы управления показана на рисунке 4. Овалами обозначены процессы, прямоугольниками– темы (именованные каналы обмена данными между модулями).

Рисунок 4. Структура программного обеспечения
Программа состоит из следующих модулей:
- модуль «/regulator» регулятора и наблюдателя внешних возмущений; Модуль регулятора и наблюдателя внешних возмущений читает навигационные данные, данные для обхода препятствий (система обхода препятствий является темой отдельной статьи), заданный режим работы, данные миссии и рассчитывает управляющие воздействия, публикуя их затем в соответствующий именованный канал (тема);
- модуль «/companav» интерфейса интегрированной навигационной системы;Модуль интерфейса интегрированной навигационной системы осуществляет чтение и декодирование пакетов навигационной системы, преобразует координаты в локальную систему и публикует полученные данные в соответствующий именованный канал (тема);
- модуль «/actuators» интерфейса блока управления исполнительными механизмами; Модуль интерфейса блока управления исполнительными механизмами осуществляет чтение управляющих воздействий, рассчитанных модулем регулятора, либо полученных модулем обмена с пунктом управления, формирует пакет и отправляет его по последовательному порту в блок управления исполнительными механизмами;
- модуль «/qdatalink» обмена данными с пунктом управления;Модуль обмена данными с пунктом управления осуществляет обмен данными с программным обеспечением пунктом управления – передает на пункт управления телеметрическую информацию, загружает на борт миссию и получает команды дистанционного управления;
- модуль «/qobstacle_avoidance_client» обмена данными с системой обхода препятствий.Модуль обмена данными с системой обхода препятствий передает навигационные данные и данные о миссии и получает данные для обхода препятствия; система обхода препятствий является темой отдельной статьи.
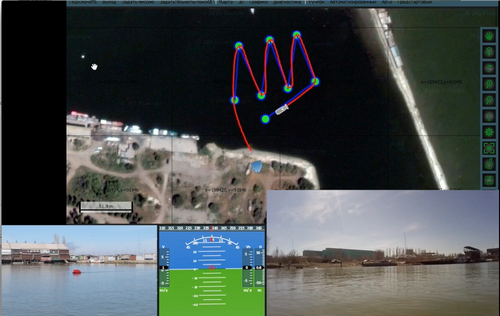
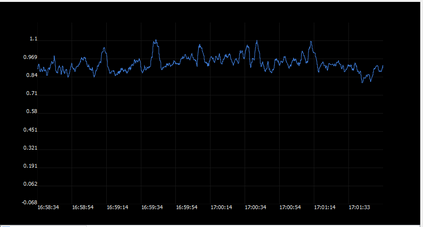
Эксперименты
Результатыавтономноговыполнениямиссиипоказанынарисунке5. С наземного пункта управления были заданы 8 путевых точек, как показано на рисунке 5а. Миссия состоит в последовательном прохождении через эти точки. График скорости при прохождении миссии показан на рисунке 5б. Некоторые результаты для других миссий показаны на рисунках 5в, 5д.
 а)
а)
 б)
б)
 в)
в)
 г)
г)
Рисунок 5. Результаты экспериментов: а) наземный пункт управления при выполнении миссии; б) график скорости; в) результаты выполнения миссии 2; г) результаты выполнения миссии 3
Заключение
Система управления показала хорошие результаты. Разработанные структура системы управления, оборудование и программное обеспечение позволят проводить дальнейшие испытания с различными алгоритмами управления в более сложных средах с препятствиями.
Авторы глубоко признательны их научному руководителю профессору Вячеславу Пшихопову.
Работа поддержана Министерством образования и науки РФ, НИР №114041540005 «Теория и методы позиционно-траекторного управления морскими роботизированными системами в экстремальных режимах и условиях неопределенности среды» по государственному заданию ВУЗам и научным организациям в сфере научной деятельности, грантами Президента Российской Федерации № НШ-3437.2014.10, МД-1098.2103.10 и грантом РФФИ 13-08-00315а.
Рецензенты:
Юханов Ю.В., д.т.н., зав. кафедрой АиРПУ,Южный федеральный университет, г. Ростов-на-Дону;
Финаев В.И., д.т.н., зав. кафедрой САУ,Южный федеральный университет, г. Ростов-на-Дону.
Библиографическая ссылка
Гуренко Б.В., Федоренко Р.В., Назаркин А.С. СИСТЕМА УПРАВЛЕНИЯ АВТОНОМНОГО НАДВОДНОГО МИНИ-КОРАБЛЯ // Современные проблемы науки и образования. – 2014. – № 5. ;URL: https://science-education.ru/ru/article/view?id=14511 (дата обращения: 19.04.2024).