



Качество изделий строительно-дорожного машиностроения определяется совокупностью свойств, характеризующих пригодность изделия для потребителя в соответствии с назначением машины. В работе [6] показатели, определяющие эффективность строительно-дорожных машин, разделяют на три группы: показатели, определяющие технические и эксплуатационные свойства машины (подвижность), экономические (производительность) и конкурентоспособность. На этапе проектирования широко используют первую группу показателей, которые определяют технические и эксплуатационные свойства машины. Одним из таких параметров является экономическая эффективность работы машины, определяющая величину энергетических затрат на объём выполненных ремонтных работ.
В настоящее время трубопроводный транспорт занимает одну из лидирующих позиций как по общему объёму перевозимых грузов (в основном нефти и газа), так и по дальности транспортировки. Однако, как и в случае с другими транспортными системами, данный вид транспорта зависит от состояния трассы транспортировки груза. Поддержание трассы трубопровода в исправном состоянии является актуальной практической задачей.
Для выполнения строительных и ремонтных работ в трассовых условиях традиционно применяются машины, обеспечивающие вскрытие трубопровода, удаление из под трубопровода призмы грунта, очистку трубы от старой изоляции и ржавчины, нанесение слоя грунта на ремонтируемый или строящийся трубопровод, нанесение мастики и оберточной пленки. Одним из агрегатов такого комплекса является машина для очистки трубопроводов от старой изоляции. Если для других типов машин выбор типа движителя обусловлен средой, с которой он контактирует, то движители машин данного типа могут располагаться впереди машины и контактировать с изоляцией трубопровода, так и позади машины и контактировать непосредственно с очищенной поверхностью трубопровода.
В качестве движителей, применяемых для ремонта и содержания трубопроводов, применяются колёсные и шагающие движители [5,7], причём для большинства машин выбор останавливается на колёсном движителе и только для подкопочной машины, работа которой связана с развитием значительного тягового усилия, применяется шаговый движитель с гидравлическим приводом. Применение иных типов движителей, например гусеничных, дальше опытных образцов не пошло.
Так как трубопровод в целом представляет собой конструкцию с меньшей толщиной металла, чем колесо (то есть обладающий меньшей жёсткостью), то при взаимодействии металлического колеса с поверхностью трубопровода последний будет проминаться и образовывать площадку контакта. При этом площадь контакта будет равна отношению прижимного усилия к предельному напряжению смятия трубопровода. То есть под воздействием металлического колеса на поверхности трубопровода возникнут напряжения, достигающие величин предела прочности конструкции трубопровода. Наиболее распространены такие модели взаимодействия колеса при движении по рельсам. При этом в отличии от трубопровода, более жёсткой системой в данном случае является рельс, а расчёт на смятие проводят для колеса (как наименее жёсткого элемента взаимодействия). Величину напряжений смятия при точечном контакте, как это бывает при взаимодействии колеса с круглой поверхностью трубопровода, принято определять из выражения [8]:
 (1)
(1)
где Q – расчетная нагрузка на колесо, кГ; EПР – приведенный модуль упругости материалов колеса и рельса, кГ/см2; R – наибольший из двух радиусов контактирующихся поверхностей (для колёс, взаимодействующих с трубопроводом, данный параметр будет равняться радиусу трубопровода), см; т – коэффициент, выбираемый из данных, приведённых в [8], в зависимости от отношения радиусов трубопровода и колеса может быть аппроксимирован выражением:
 (2)
(2)
Для стальных колёс и стального трубопровода ЕПР = 2,1 106 кг/см2
Результаты расчёта по данной зависимости приведены на рис. 1. Анализ полученных данных позволяет сделать вывод о том, что предельное напряжение смятия для стали, равное 1000 -1800 кг/см2, достигается при нагрузке на колесо, равной:
 1,2 - 7 кг,
1,2 - 7 кг,
что явно недостаточно для формирования нагрузки на движителе.
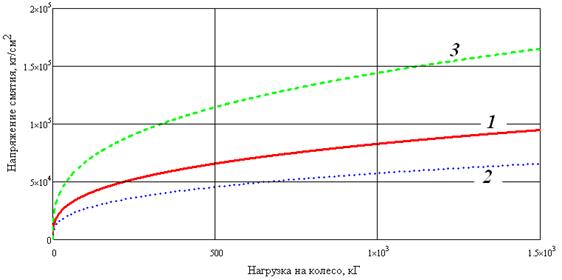
Рис. 1. Зависимость между нагрузкой на колесо и напряжением смятия, возникающим в зоне контакта жёсткого колеса и трубопровода
1 – для колеса с радиусом качения 0,25м и трубопроводом диаметром 1200 мм.
2 – для колеса с радиусом качения 0,50 м и трубопроводом диаметром 1200 мм.
3 – для колеса с радиусом качения 0,25 м и трубопроводом диаметром 800 мм.
Полученные результаты свидетельствуют о том, что применение металлического колеса без эластичной оболочки в качестве прижимного движителя, применяемого для движения по очищенной поверхности трубопровода, ведёт к повреждению трубопровода, что значительно снижает срок службы. Поэтому в дальнейшем при расчётах мы будем использовать зависимости только для колёсных движителей с эластичной оболочкой.
Вместе с тем анализ выполненных работ позволяет сделать вывод о том, что выбор типов движителей основывается не на разработанных теориях взаимодействия движителей с поверхностью трубопроводов, а исключительно на основании практического применения машин различных типов, поэтому научно-обоснованных работ, которые бы обосновывали рациональные границы применения тех или иных движителей, в настоящее время не имеется.
Анализ работы движителей позволил в качестве критерия выбрать экономическую эффективность работы движителя, а именно мощность, затрачиваемую на перемещение машины. Следует отметить, что достоверные данные по сравнению качества работы движителя может быть получены только при сопоставимых скоростях движения машин. Таким образом, в связи с тем, что, если разделить мощность на скорость движения, будет получена величина силы сопротивления движению, то есть наиболее адекватным показателем эффективности работы движителя будет соотношение силы тяги, развиваемой движителем, к силе сопротивления движению, которое соответствует данным условиям работы. Площадь контакта шагающего движителя выбирается конструктивно.
Средняя за цикл полезная мощность привода Nпол.ср для привода с гидроцилиндром определяется из выражения [2]:
 , (3)
, (3)
где Ri – усилие, действующее на гидроцилиндр на протяжении i-ой операции, Н; υi – скорость хода поршня при i-ой операции, м/сек; Δti – продолжительность i-ой операции, сек; tЦ – продолжительность всего цикла. Для шагающего движителя, приводимого в действия гидроцилиндрами, выражение силы тяги через данное уравнение примет вид:
![]() , (4)
, (4)
где φ – коэффициент сцепления поверхности движителя с поверхностью трубопровода (данная величина для большинства используемых материалов находится в пределах от 0,7 до 0,8); h – коэффициент полезного действия гидравлического привода (согласно [6] за время работы может изменяться от 0,9 до 0,2 среднее значение может быть признано равным 0,6).
Работа колёсных движителей на поверхности трубопроводов было описано в работах [3,4], исходя из которых соотношение усилия прижатия и силы тяги можно найти из условия:
 (5)
(5)
При этом рациональное количество катков в зависимости от КПД привода будет определяться из условия:
![]() , (6)
, (6)
где N – количество приводных катков.
Так как обеспечения прижима катков к трубопроводу необходимо обеспечивать их изменение положение в пространстве, то наиболее эффективно такая конструкторская задача решается путём использования либо гидравлической, либо электрической трансмиссии, имеющим коэффициент полезного действия от 0,7 до 0,8. Количество катков прижимного движителя для таких показателей будет находиться в пределах от 3 до 5. Так как конструктивно число колёс прижимного движителя должно быть чётным, то следует сделать вывод о том, что рациональным количеством катков прижимного движителя является величина, равная 4.
С учётом того, что величина усилия прижатия колёсного движителя ограничена величиной контактных напряжений, действующих в месте контакта, соотношение ширины движителя, диаметра трубопровода и усилия прижатия будет иметь следующий вид:
![]() , (7)
, (7)
где А – эмпирический параметр, равный 0,00045 1/[H2/3м1/6]. Сила тяги, исходя из данных, приведённых в [3 и 4], в зависимости от кпд привода каждого ролика h, коэффициента сцепления ролика с поверхностью трубопровода φ и числа приводных роликов N примет вид:
 , (8)
, (8)
где К – эмпирический параметр, равный 0,000002025 Н/[ м2/3].
Величина потребной прижимной силы тогда определится как отношение силы тяги к коэффициенту трения, а сила сопротивления движению как отношение прижимной силы к коэффициенту сопротивления движению:
 (9)
(9)
Отношение суммарной силы тяги к суммарной силе сопротивления движению примет вид:
![]() (10)
(10)
Решение данного уравнения показано на рис.2.
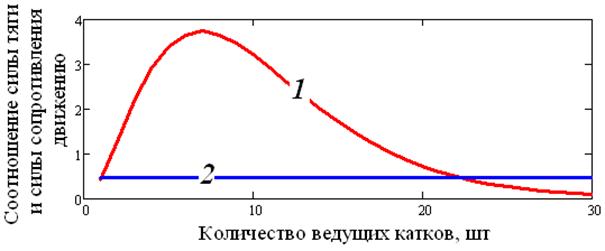
Рис. 2. Соотношение между силой тяги и силой сопротивления движению каткового (1) и шагающего (2) движителей
Исходя из уравнения (9), при величине приводных катков равных 23, величина силы тяги, развиваемой колёсным движителем, будет равняться 2,5 тонн. При меньшей силе тяги, развиваемой движителем, большую энергетическую эффективность имеет колёсный движитель, а при большей – шагающий. Полученные данные позволяют на этапе проектирования выбрать наиболее рациональный тип движителя для машин по ремонту и содержанию трубопроводов. Так как для работы очистной машины необходимо тяговое усилие в пределах от 1 до 3 тонн, то следует сделать вывод о том, что на машинах данного типа наиболее рациональным является применение колёсного движителя.
Рецензенты:
Беляков В.В., д.т.н., профессор кафедры «Автомобили и тракторы» ФГБОУ ВПО «Нижегородский государственный технический университет им. Р.Е. Алексеева», г. Нижний Новгород.
Вахидов У.Ш., д.т.н., заведующий кафедрой «Строительные и дорожные машины» ФГБОУ ВПО «Нижегородский государственный технический университет им. Р.Е. Алексеева», г.Нижний Новгород.
Библиографическая ссылка
Артюшкин А.В., Макаров В.С., Молев Ю.И., Шапкин В.А. ОЧИСТНАЯ МАШИНА ДЛЯ РЕМОНТА И СОДЕРЖАНИЯ ТРУБОПРОВОДОВ. РЕКОМЕНДАЦИИ ПО ВЫБОРУ ТИПА ДВИЖИТЕЛЯ // Современные проблемы науки и образования. – 2013. – № 6. ;URL: https://science-education.ru/ru/article/view?id=10925 (дата обращения: 19.04.2024).