



Введение
Известные автобалансирующие устройства (АБУ) достаточно эффективно уменьшают режимное изменение дисбаланса ротора. Однако такая результативность достигается за счет использования тяжелой жидкости (ртути) в качестве корректирующей массы. При разработке машин и приборов стремятся избегать использования высокотоксичных веществ. Имеющиеся нетоксичные жидкости обладают плотностью не более 2 г/см3, поэтому использование их в качестве корректирующей массы в жидкостных АБУ, вместо ртути, ведет к снижению эффективности автоматической балансировки ротора [4, 5]. Именно из-за недостаточной эффективности жидкостных АБУ, обусловленной малой плотностью жидкости, факторы, влияющие на точность балансировки, были слабо освещены. На кафедре ТПМ ТПУ было разработано устройство [1], позволяющее многократно повышать эффективность автоматической балансировки роторов с помощью жидкостных АБУ. В связи с этим возникла необходимость исследования различных факторов, которые влияют на точность балансировки.
Материал и методы исследования
Как уже было показано (рис. 1), в жидкостном автобалансирующем устройстве участвует в процессе балансировки только часть жидкости внутренней поверхностью резервуара и цилиндрической поверхностью, касающейся поверхности резервуара и имеющей ось, совпадающую с осью ротора. Масса этой жидкости удовлетворяет граничному значению в условии ее достаточности, т.е. при заданном значении прогиба вала свободная поверхность жидкости касается внутренней поверхности резервуара.
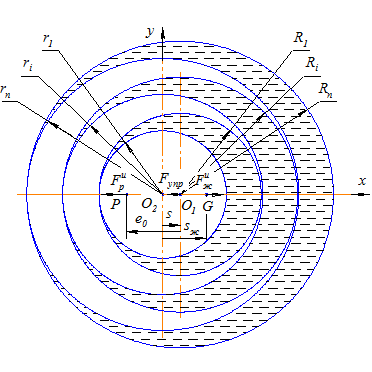
Рис. 1. Схема сил в многорезервуарном устройстве
Остальная часть жидкости в процессе балансировки не участвует. На основе этого было предложено автоматическое балансировочное устройство с несколькими концентрическими резервуарами, оси внутренних цилиндрических поверхностей которых совпадают с осью ротора. Это устройство будем в дальнейшем называть многокамерным устройством [3]. Работает многорезервуарное автобалансирующее устройство подобно жидкостному АБУ с одним резервуаром. Проанализируем его работу.
Результаты исследования и их обсуждение
Пусть ротор имеет статический дисбаланс (рис. 1), т.е. центр масс ротора (точка P) смещен относительно оси ротора (в проекции точка O1) на величину e0. При вращении ротора с постоянной частотой ω, превышающей критическую, происходит прогиб оси вала ротора таким образом, что выполняется равенство сил, действующих на систему:
![]()
или в проекциях на ось x:
![]() , (1)
, (1)
где: ![]() – сила инерции жидкости в i- том резервуаре, приложенная к ее центру масс;
– сила инерции жидкости в i- том резервуаре, приложенная к ее центру масс;
![]() – масса жидкости в i- том резервуаре в соответствии с условием ее достаточности;
– масса жидкости в i- том резервуаре в соответствии с условием ее достаточности;
 – расстояние от оси вращения ротора до центра масс жидкости для i-того резервуара;
– расстояние от оси вращения ротора до центра масс жидкости для i-того резервуара;
Ri, ri – радиус внутренней поверхности резервуара и радиус свободной поверхности жидкости для i-того резервуара;
n – число резервуаров.
Условие достаточности жидкости в многорезервуарном устройстве отличается от аналогичного условия в жидкостном АБУ с одним резервуаром. В многорезервуарном устройстве условие достаточности жидкости выполняется, если свободная поверхность жидкости в i-том резервуаре не пересекается с внутренними цилиндрическими поверхностями этого резервуара, образованными цилиндрическими перегородками [6, 7]. Поэтому условие достаточности жидкости в многорезервуарном устройстве имеет вид:
![]() ;
; ![]() , (2)
, (2)
где δ – толщина стенки цилиндрической перегородки.
Учитывая условие достаточности жидкости (2), определяем из уравнения амплитуды колебаний ротора при балансировке его с помощью многорезервуарного устройства:
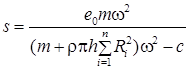 . (3)
. (3)
Отсюда видно, что в отличие от жидкостного АБУ с одним резервуаром, в многорезервуарном устройстве амплитуда колебаний ротора тем меньше, чем больше число резервуаров и чем больше радиусы их внутренних поверхностей. Эта амплитуда колебаний не зависит от массы жидкости в камере при выполнении условия ее достаточности (2).
Используя выражение (3) для многорезервуарного автобалансирующего устройства, можно получить выражения для определения критической частоты вращения ротора и эффективности автоматической балансировки:
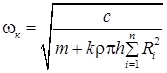 ; (4)
; (4)
 . (5)
. (5)
Выводы
Результаты проведенной работы показывают, что эффективность автоматической балансировки увеличивается с ростом числа резервуаров. Критическая частота вращения ротора уменьшается с ростом числа резервуаров.
Рецензенты:
Тарасов Сергей Юльевич, д.ф.-м.н., с.н.с. ИФПМ СО РАН, г. Томск.
Пушкарев Александр Иванович, д.ф.-м.н., сотрудник ООО «Инженерно-физический центр», г.Томск.