



Введение
Большинство типичных техногенных объектов на сегодня представляют собой эргатические системы, под которыми понимают сложные системы управления, составным элементом которой является человек-оператор. При этом человек-оператор является главным источником возникновения внештатных и аварийных ситуаций в эргатических системах, провоцируя до 70 % их из общего количества инцидентов [7].
Анализ деятельности оператора свидетельствует, что ошибки оператора проявляются в трех функциональных частях: мотивационной, ориентировочной и исполнительной. При этом наиболее действенными мерами по снижению аварийных ситуаций и несчастных случаев на производстве является профилактика нарушений исполнительной части, а именно – профессиональный отбор кандидатов на операторские должности [4].
В связи с этим возникает задача определения профпригодности операторов, решение которой является важным и актуальным для повышения надежности человека-оператора в структуре эргатической системы.
Целью работы является разработка методологии оценки профпригодности оператора эргатических систем, обеспечивающей требуемую точность и достоверность оценки.
Методы исследования
Для успешного обучения и эффективной профессиональной деятельности оператор должен обладать соответствующими профессионально-важными качествами (ПВК), которые определяются как физические, анатомо-физиологические, психические и личностные свойства человека, необходимые для решения его профессиональных задач [1].
В связи с этим разработаны многочисленные подходы к оценке ПВК, основанные на методах тестирования и лабораторного эксперимента и направленные на моделирование операторской деятельности.
В настоящее время наиболее известны подходы к оценке профпригодности на основе профессиограмм [3, 2] и посредством оценки успешности операторской деятельности на отдельных ее этапах [6].
В то же время следует отметить, что задача оценки профпригодности оператора не тривиальна в силу сложных перекрестных связей между ПВК, сложности интерпретации результатов тестирования и формализации процессов операторской деятельности. До сих пор недостаточно изучены вопросы выбора отдельных ПВК, их взаимосвязь с успешностью операторской деятельности, отсутствует единый методический подход к проведению исследований, наблюдается неполнота решения проблемы профотбора оперативного персонала эргатических систем на основе достижений современных интеллектуальных технологий.
Для представления и анализа знаний о профессиональной деятельности человека-оператора в структуре эргатической системы управления представим процесс взаимодействия человека-оператора, технической системы и среду в виде семантической сети, как показано на рис. 1.
Введем понятие акта операторской деятельности: под актом операторской деятельности понимаем законченную последовательность отдельных неповторяющихся операторских действий, реализующих единичный цикл управления.
Согласно этому в дальнейшем будем рассматривать операторскую деятельность в виде цикличного выполнения актов операторской деятельности.
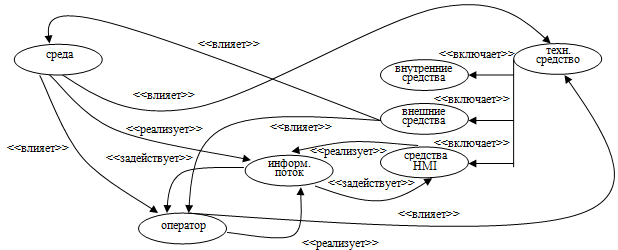
Рис. 1. Модель анализа процесса взаимодействия в эргатической системе
Учитывая известное разделение операторской деятельности на некоторые типичные этапы, примем правомочность разделения акта операторской деятельности на отдельные этапы:
С = {Сi}, i = 1, N
где Сi – элемент системы, представляющий отдельный этап операторской деятельности (под элементом системы понимается простейшая неделимая операция), i – количество этапов операторской деятельности.
Каждый из этапов операторской деятельности, в свою очередь, характеризуется набором элементарных операторских действий: ![]()
где Ci – элемент системы, представляющий этап операторской деятельности, i – количество этапов, Kj – операторское действие, i – количество действий.
В качестве условия декомпозиции выбрано условие пересечения множество элементарных действий: если для любых j и l множество элементов системы не пересекается ![]() то дальнейшей декомпозиции не требуется.
то дальнейшей декомпозиции не требуется.
На основе анализа графа операторских действий на предмет выявления контура неповторяющихся операторских действий С1 → Сi → Сi+1 → СN, предложено выделять четыре этапа операторской деятельности: С = {С1, С2, С3, С4}, где С1 – этап приема и восприятия поступающей информации, С2 – этап оценки и переработки информации, С3 – этап принятия решений, С4 – этап реализации принятого решения, отображающие последовательное изменение модели оперативного управления, как показано на рис. 2.
В соответствии с известной моделью очередности операторских действий Y. Liu и C. Wu [8] на схеме последовательности этапов операторских действий выделим сенсорный, когнитивный и моторный уровни.
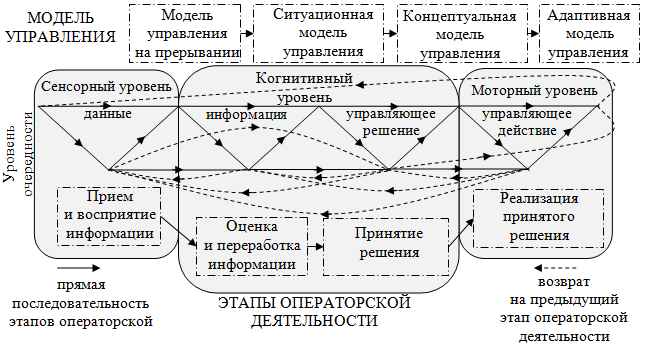
Рис. 2. Системная модель операторских функций
Концепция оценки профпригодности базируется на основе анализа эффективности действий на каждом из выделенных этапов операторской деятельности и уровней очередности операторских действий с учетом известных требований к содержанию ПВК, определенных в профессиограммах.
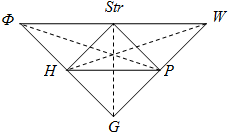
Рис. 3. Модель эргатической системы
Согласно триадной системной концепции, предложенной в работе [5], описание эргатической системы может быть представлено в виде множества триад, образованных множествами системообразующих факторов: Sэс=< Ф, Н, Str, P, W, G>, где Ф – множество первичных элементов ЭСУ (человек-оператор, машина, среда), Н – множество отношений между базовыми элементами ЭСУ, Str – множество структур, Р – множество параметров базовых элементов (параметры ЭСУ), W – интегративные свойства системы (свойства ЭСУ), G – цели функционирования системы, как показано на рис. 3.
На основе данной триады выделим контур человека-оператора в структуре эргатической системы: ![]() ,
, ![]() ,
, ![]() , где
, где ![]() – человек-оператор, w – интегративные свойства контура управления человеком, p – параметры человека-оператора.
– человек-оператор, w – интегративные свойства контура управления человеком, p – параметры человека-оператора.
Тогда триада системообразующих факторов человека-оператора примет следующий вид: Sчо=< U, Нчо, Strчо, R, T, G>, где U – множество базовых элементов человека-оператора (сенсорный, когнитивный, моторный уровни очередности действий оператора), Нчо – множество отношений между элементами системы, Strчо – множество структур, обеспечивающих организованность системы, R – множество параметров сенсорного, когнитивного и моторного уровней, Т – интегративные свойства системы (свойства человека-оператора), G – цели функционирования системы.
В свою очередь система параметров человека-оператора, характеризующая профпригодность, также может быть раскрыта в виде соответствующей триады Sпп=. При этом A представляет множество базовых элементов профпригодности (характеристики профессиограммы), Нпвк – множество отношений между элементами системы, Strпвк – множество структур, обеспечивающих организованность системы, Впвк – множество параметров базовых элементов (параметры характеристик профессиограммы), Z – интегративные свойства системы (профпригодность), G – цели функционирования системы.
Затем, раскроем систему профпригодности в виде характеристик профессиограммы и параметров, характеризующих успешность реализации производственных функций на отдельных этапах операторской деятельности, а также сенсорном, когнитивном и моторном уровнях операторской деятельности.
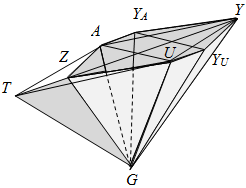
Рис. 4. Модель успешности операторской деятельности
Тогда, модель успешности операторской деятельности может быть представлена в виде многопараметрической структуры системных знаний: S={T, Z, A, U, Y, G}, где T – множество свойств человека оператора; Z – множество показателей профпригодности; А – множество характеристик профессиограммы; U – множество этапов операторской деятельности; YU – множество ПВК, определенных через U, YА – множество ПВК, определенных через А, Y – множество оцениваемых ПВК; Z – цель управления.
В этом случае модель цикла оценки профпригодности может быть представлена в виде пространственной структуры системных знаний S, рис. 4, где могут быть выделены следующие уровни анализа и обработки информации:
1. T→Z: Анализ операторской деятельности, представление знаний о профессиональной деятельности оператора ЭСУ.
2. Z→A: Выявление характеристик профессиограммы, характеризующих профессиональную пригодность оператора.
3. Z→U: Выявление параметров, характеризующих успешность операторских действий на отдельных этапах операторской деятельности и уровнях очередности.
4. A→YA: Выявление ПВК, соответствующих профессиограмме.
5. U→YU: Выявление ПВК, характеризующих успешность операторских действий на отдельных этапах операторской деятельности и уровнях очередности операторских действий.
6. ![]() : Выявление ПВК, используемых для оценки профпригодности.
: Выявление ПВК, используемых для оценки профпригодности.
Выбор ПВК YA осуществляется в четыре этапа:
1. Выявление характеристик профессиограммы P={A1, … , An}, покрывающих все этапы операторской деятельности: ![]() .
.
2. Обеспечение инвариантности характеристик профессиограммы посредством анализа матрицы коэффициентов взаимосвязей характеристик профессиограммы и внешних и внутренних параметров системы:
 ,
,
где E = {e1, e2, e3, e4} – совокупность внешних факторов (e1 – факторы трудовой среды, e2 – алгоритмизации действий, e3 – автоматизации, e4 – организации трудового процесса), O = {o1, o2, o3} – совокупность внутренних факторов (o1 – информационные, o2 – организационные, o3 – психофункционального состояния).
Затем осуществляется операция ранжирования rankC1(P) по критерию минимума: ![]() , обеспечивающего свойство инвариантности C1 характеристик профессиограммы.
, обеспечивающего свойство инвариантности C1 характеристик профессиограммы.
3. Обеспечение значимости отдельных характеристик профессиограммы для эффективного выполнения операторской деятельности на определенных этапах посредством ранжирования множества характеристик профессиограммы P={A1, … , An} по критерию мощности (1-β): rankC2(P), где β – ошибка второго рода с использованием методов экспертной оценки.
4. Двухкритериальный выбор ПВК YA по критериям инвариантности C1 и мощности C2 с использованием диаграмм Парето посредством поиска парето-оптимальных решений ![]() , образующих множество Парето
, образующих множество Парето ![]() , и отсева слабо эффективных решений – альтернатив характеристик профессиограммы А', которые не может быть улучшены сразу по всем критериям C1 и C2. Отсев слабо эффективных решений сопровождается проверкой на условие покрытия совокупности альтернатив всех этапов операторской деятельности
, и отсева слабо эффективных решений – альтернатив характеристик профессиограммы А', которые не может быть улучшены сразу по всем критериям C1 и C2. Отсев слабо эффективных решений сопровождается проверкой на условие покрытия совокупности альтернатив всех этапов операторской деятельности ![]() . В случае, если условие не выполняется, то отсев слабо эффективного решения не производится.
. В случае, если условие не выполняется, то отсев слабо эффективного решения не производится.
Выбор ПВК YА осуществляется на основе известных профессиограмм в соответствии с сформулированными условиями выбора альтернатив. Так как характеристики профессиограмм и ПВК являются терминами различных предметных областей, воспользуемся методами отображения онтологий.
Согласно этому, представим онтологию характеристик профессиограммы О1 и онтологию ПВК и психофизиологических параметров О2 и найдем отображение онтологии О1 на онтологию О2 посредством поиска для каждого из концептов онтологии О1 подобных ему концептов в онтологии О2.
С использованием одного из известных критериев подобия онтологий определим ![]() таким образом, чтобы выполнялось условие подобия сущностей
таким образом, чтобы выполнялось условие подобия сущностей ![]() и
и ![]() :
: ![]() , где t – уровень подобия,
, где t – уровень подобия, ![]() ,
, ![]() . В результате отображения онтологий получаем множество
. В результате отображения онтологий получаем множество ![]() , где n – количество ПВК.
, где n – количество ПВК.
Аналогичным образом осуществим процедуру выявления ПВК YU, характеризующих успешность операторских действий на отдельных этапах операторской деятельности и успешность действий на сенсорном, когнитивном и моторном уровнях.
Для этого осуществим отображение U онтологии О3 в понятии ПВК YU онтологии О4, где ![]() ,
, ![]() .
.
В качестве меры близости двух понятий онтологии используем оценку длины кратчайшего пути между двумя соответствующими вершинами таксономии, соответствующих этим понятиям в таксономической иерархии (IS-A):
![]() ,
,
где N – глубина дерева, ![]() – длина кратчайшего пути между вершинами.
– длина кратчайшего пути между вершинами.
Затем, осуществляем процедуру выявления ПВК, используемых для оценки профпригодности![]()
![]() ,
, ![]()
Общий алгоритм действий, описывающих процедуру оценки операторской профпригодности, представим в виде алгоритма-силуэта в соответствии с правилами визуального языка для построения блок-схем алгоритмов ДРАКОН, как показано на рис. 5.
Функционалом качества профпригодности является: ![]() .
.
где y1, … , yn – отдельные ПВК, E – совокупность внешних факторов, О – совокупность внутренних факторов.
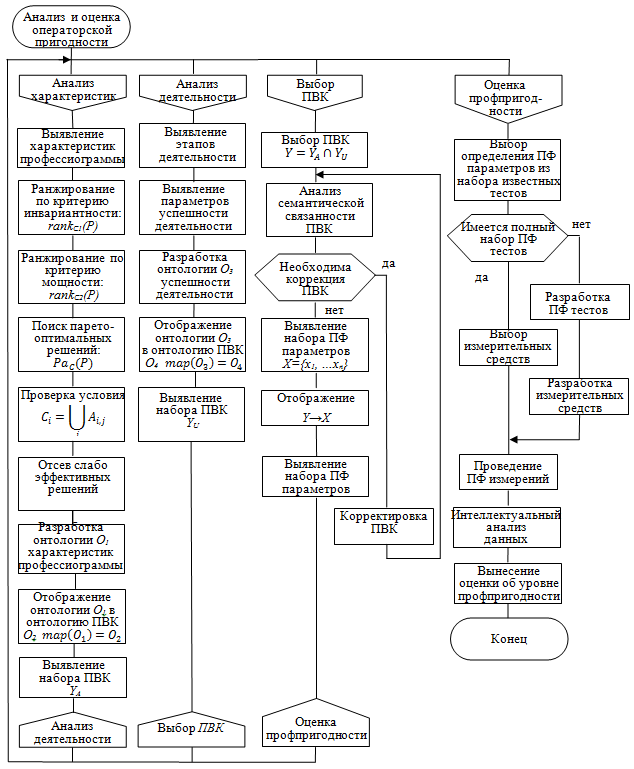
Рис. 5. Алгоритм действий, описывающих процедуру оценки операторской профпригодности
Так как ПВК, в общем случае, не поддаются измерению, предложено осуществлять их оценку посредством измерения психофизиологических (ПФ) параметров, характеризующих ПВК. Для этого требуется найти отображение множества ПВК Y={y1, …y12} на множество ПФ тестов X={x1, …xn}, характеризующих ПВК Y→X, при котором одному элементу y множества Y соответствует один или несколько элементов х множества Х. Условием отображения является его сюръективность.
Выбор ПФ тестов осуществляется с использованием методов экспертной оценки, для чего изначально определяется множество ПФ параметров {xi}, а затем строится матрица образов, в которой принадлежность xi ПВК yi отображается единицей, а отсутствие – нулем.
Так как одни и те же ПФ параметры могут входить в состав различных ПВК, то интегральный показатель профпригодности определится в виде:
![]() ,
, ![]() , где
, где ![]() .
.
Разработанный алгоритм реализует представленную методологию приобретения, обработки и представления знаний об операторских функциях и профпригодности оператора эргатических систем и описывает процедуру оценки профпригодности, включающую этапы выявлении характеристик профессиограммы и параметров, характеризующих успешность операторской деятельности, выбора ПВК и определения набора ПФ тестов.
Заключение
Таким образом, с использованием системного подхода разработана обобщенная многоэтапная методология построения системы поддержки принятия решений при оценке профпригодности оператора эргатических систем на основе приобретения, обработки и представления знаний об операторской деятельности.
Данная методология объединяет подходы к оценке профпригодности на основе профессиограмм, посредством оценки успешности операторской деятельности на отдельных ее этапах, оценки успешности операторской деятельности на сенсорных, когнитивных и моторных уровнях очередности действий.
Практическая реализация системы оценки профпригодности может быть осуществлена с использованием методов интеллектуального анализа данных и систем поддержки принятия решений для широкой номенклатуры операторских профессий и должностей.
Приведенные в статье результаты получены в рамках выполнения государственного задания на НИР в 2013 году при поддержке гранта № 2.1.2/11610 «Методическое, алгоритмическое и программно-техническое обеспечение исследования временных аспектов сенсорного восприятия человека-оператора».
Рецензенты:
Роженцов Алексей Аркадьевич, доктор технических наук, профессор, заведующий кафедрой радиотехнических и медико-биологических систем, ФГБОУ ВПО «Поволжский государственный технологический университет», г. Йошкар-Ола.
Попов Иван Иванович, доктор физико-математических наук, профессор, профессор кафедры конструирования и производства радиоаппаратуры ФГБОУ ВПО «Поволжский государственный технологический университет», г. Йошкар-Ола.