



Введение
На сегодняшний день существуют определенные способы проверки электрических машин после ремонта, рекомендованные для использования с целью упрощения процесса диагностирования технического состояния, получения наиболее полных данных о возможности дальнейшей эксплуатации такой машины, а также с целью уменьшения затрат на дорогостоящую аппаратуру [3]. Комплексные стенды для проверки технического состояния электрических машин не нашли широкого применения на судоремонтных предприятиях Камчатского края ввиду сложности таких устройств в эксплуатации.
Существующая проблема на данный момент не нашла достойного решения, в разных цехах по ремонту электрооборудования применяются различные методы, не соответствующие степени точности проверки асинхронных двигателей после ремонта.
Целью работы являлось проектирование устройства для определения неисправностей электрических машин, исключающее применение механических соединений, проверку предлагаемого устройства на имитационной модели.
Материалы и методы
Значительно повысить надежность процесса диагностирования асинхронных электродвигателей возможно при помощи свойств обратимости электрических машин. На основе теории электрических машин можно сделать вывод об удовлетворении степени прочности конструктивных элементов машин при переходе в режим генератора. Кроме того, по условиям ограничения потерь, нагрева и высокого КПД в генераторном режиме возможны значения абсолютных величин скольжения такого же порядка, как и в двигательном [1]. Переход в устойчивый режим асинхронного генератора связан с некоторыми трудностями. Кроме того, согласование частот приводного двигателя и асинхронного генератора при помощи механического соединения и центровки электрических машин для разгона и получения обратного скольжения затруднительно. В то же время может оказаться перспективным перевод в режим генератора на короткий промежуток времени путем изменения частоты питающего напряжения [5]. Такого процесса может быть вполне достаточно для получения необходимой информации о техническом состоянии электрической машины.
Из всего вышесказанного можно сделать вывод о том, что проводить испытание электродвигателя целесообразно при помощи устройства, электрическая схема которого представлена на рисунке 1.
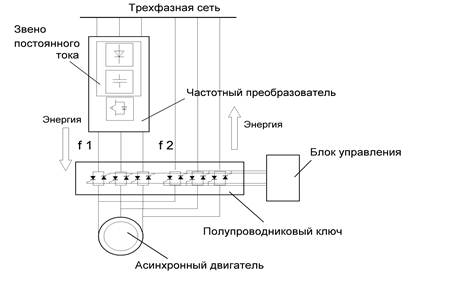
Рис. 1. Структурная схема частотного управления АД с отдачей энергии в сеть: f 1 – частота преобразователя; f 2 – частота сети.
Переключение питания электродвигателя от частотного преобразователя к сети в момент максимальной скорости производится путем коммутации, причем сеть будет работать как потребитель электрической энергии до установления двигательного режима. Скорость двигателя при этом изменяется периодически от максимального значения до минимального с частотой задания блока управления преобразователем частоты ПЧ.
На рисунке 2 представлена модель предлагаемой системы, осуществляющей процесс перехода в кратковременный генераторный режим при помощи преобразователя частоты, реализованная в программе компьютерного моделирования средствами пакета MATLAB 7.0 [2].
Модель включает в себя:
1) инвертор с коэффициентом модуляции 0.95 и частотой 60 Гц [6];
2) силовые размыкающий и замыкающий по времени трехфазные ключи;
3) асинхронный электродвигатель с короткозамкнутым ротором мощностью 4 Квт;
4) сеть с частотой 50 Гц и напряжением 380 В.
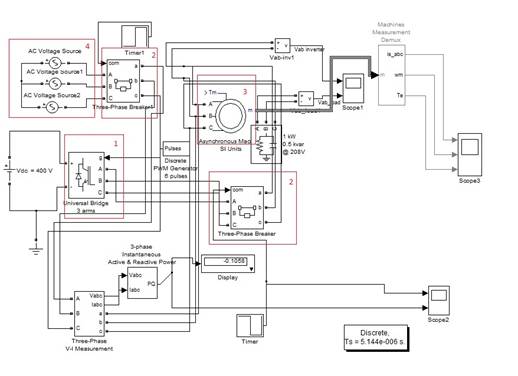
Рис. 2. Модель устройства для нагрузки асинхронного двигателя электромагнитным моментом: блок 1 – инвертор; блок 2 – трехфазный переключатель; блок 3 – испытуемый асинхронный электродвигатель; блок 4 – сеть.
Результаты
На рисунке 3 представлены результаты моделирования: напряжение на статоре, график изменения скорости, график изменения электромагнитного момента, кривые мощности.
На участке от 0 до 0.15 происходит установление заданной скорости, соответствующей частоте 60 Гц, при этом на участке от 0 до 0.1 с можно различить резкие колебания момента, соответствующие колебаниям момента при прямом пуске асинхронного двигателя от источника напряжения. Затем на отрезке времени от 0.2 с происходит переключение с частотного преобразователя на сеть 50 Гц. Переключение сопровождается изменением формы напряжения статора и его частоты. Изменение формы является следствием напряжений биения между сетью и двигателем, работающим на данном участке в режиме генератора и отдающим электроэнергию в сеть. О переходе электродвигателя в режим асинхронного генератора свидетельствуют следующие показатели:
1) отрицательное значение момента на участке от 0.2 с;
2) уменьшение частоты питающего напряжения при неизменной частоте вращения двигателя и достижение обратного значения скольжения как следствие;
3) активная мощность на участке имеет отрицательное значение, что говорит об изменении направления протекания тока.
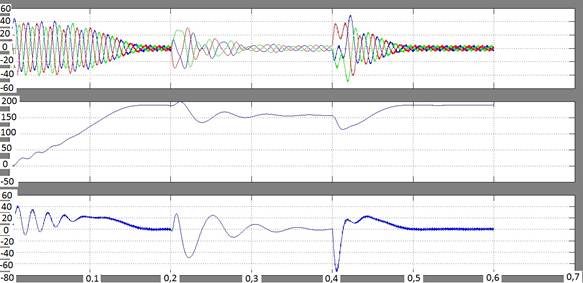
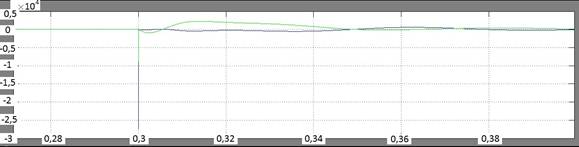
Рис. 3. Результаты моделирования при подключении частотного преобразователя 60 Гц: напряжение на статоре, скорость электродвигателя, электромагнитный момент, мощность.
На участке времени от 0.4 с происходит переключение электродвигателя на преобразователь, происходит разгон до скорости, соответствующей частоте 60 Гц. Теоретически максимальной частоте электродвигателя может соответствовать частота сети менее 60 Гц, но использование прикладных программ позволяет разгонять электродвигатель максимально без механических повреждений. Из всего вышесказанного можно сделать вывод о том, что проводить испытание электродвигателя с использованием электрической нагрузки вместо механической при использовании разработанной схемы возможно, но с поправкой некоторых нюансов [4].
На рисунке 3 видны колебания при переключении от сети 60 Гц на 50 Гц, это можно объяснить несоответствием напряжений по фазе двух источников (асинхронного генератора и сети 50 Гц), работающих параллельно на участке времени от 0.2 до 0.25 секунды. На первой диаграмме напряжений четко видно искривление синусоидального сигнала.
Из проведенных экспериментов можно сделать вывод об использовании как можно большей разности частот питающих напряжений источников, но невозможность частотного преобразователя со звеном постоянного тока пропускать электрический ток в обратном направлении вынуждает применять трехфазную сеть и ставит барьер частоты напряжения не ниже 50 Гц.
Эффективным решением при схемотехнической реализации является решение с понижением частоты питания асинхронного двигателя с 50 до 25 Гц, что потребует разработки обратимого частотного преобразователя, питающегося от сети 50 Гц, или двух односторонних преобразователей с цепями коммутации, управляемых микропроцессором.
Основным недостатком переключения на сеть с напряжением 25 Гц является необратимость частотного преобразователя, поэтому для подтверждения эффективности предлагаемого метода на рисунке 4 представлена схема с применением синхронного генератора, реализованная в программе «Матлаб».
Генератор находится на одном валу с асинхронным электродвигателем, который получает питание от преобразователя частоты. Данная конструкция позволяет реализовать получение выходного напряжения с заданной частотой. Для этого нужно только изменять напряжение на выходе частотного преобразователя соответственно частоте на выходе синхронного генератора (в данном случае 25 Гц).
Испытуемый асинхронный двигатель в первый момент времени вращается от сети частотой 50 Гц, затем при достижении номинальной частоты вращения переключается на синхронный генератор. В этот момент времени двигатель переходит в генераторный режим и отдает энергию на синхронный генератор. При испытании электродвигателя по такой схеме можно ожидать снижения напряжений биений в силу пропорциональности частот двух питающих напряжений.
На рисунке 4 блок 1 представляет собой сеть с частотой напряжения 50 Гц, сеть кратной частоты 25 Гц реализована при помощи сети и асинхронного двигателя (блок 2), приводящего во вращение синхронный генератор (блок 3). Механическое соединение электрических машин реализовано при помощи связи по скорости, причем номинальная скорость вращения электродвигателя соответствует номинальной скорости генератора. При этом уменьшение частоты питающего напряжения сети 2 привело к уменьшению скорости вращения синхронного генератора и уменьшению скорости испытуемого электродвигателя в два раза соответственно. Блок 4 представляет собой ключ, управляемый при помощи микроконтроллера 5, реализующего управляющий сигнал по времени.
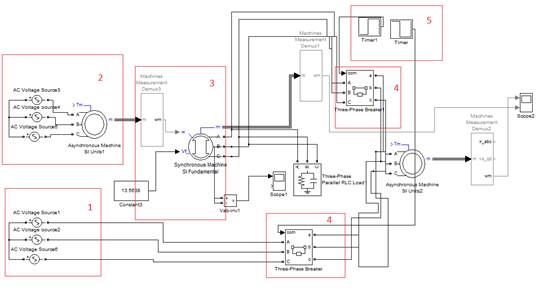
Рис. 4. Компьютерная модель с использованием синхронного генератора и приводного асинхронного двигателя: блок 1 – трехфазная сеть; блок 2 – асинхронный приводной электродвигатель; блок 3 – синхронный генератор; блок 4 – трехфазный переключатель; блок 5 – управляющий микроконтроллер.
Основной задачей проектирования данной модели является теория об уменьшении всплесков и биений напряжений при переключении питания от источника с напряжением большей частоты на источник с напряжением, частота которого кратна напряжению первого источника. Ниже представлены результаты моделирования (рис. 5).
В момент времени 0.6 секунд происходит переключение источников питающего напряжения с частоты 50 Гц на источник с частотой 25 Гц. Процессу рекуперативного торможения соответствует участок резкого падения скорости испытуемого электродвигателя.
Из данных рисунка 5 можно сделать вывод об уменьшении времени биений между напряжениями сети и асинхронного двигателя в генераторном режиме.
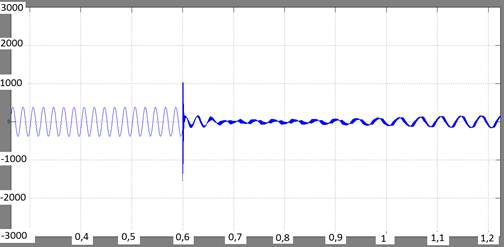
Рис. 5. Изменение напряжения при переходе в генераторный режим асинхронного двигателя.
Наложение двух синусоидальных сигналов происходит на участке приблизительно от 0.67 до 0.74, что соответствует длительности переходного процесса приблизительно 0.07 секунд, далее по времени сигнал принимает форму синусоидально с устанавливающейся частотой 25 Гц, следовательно, предложенный метод позволяет достигнуть длительности режима приблизительно увеличенным в два раза.
Выводы
Для получения значения полной мощности, отдаваемой в сеть при рекуперативном торможении двигателем необходимо получение значений на длительном промежутке времени, что может быть достигнуто при циклическом увеличении частоты сети и ее уменьшении. При получении среднего значения мощности на длительном промежутке времени необходимым условием является плавное прохождение переходных процессов также при увеличении частоты питающего напряжения.
Эффективным решением при схемотехнической реализации является решение с понижением частоты питания асинхронного двигателя с 50 до 25 Гц, что потребует разработки обратимого частотного преобразователя, питающегося от сети 50 Гц, или двух односторонних преобразователей с цепями коммутации, управляемых микропроцессором.
Рецензенты:
Егоров Андрей Валентинович, доктор технических наук, профессор кафедры «Теоретическая электротехника и электрификация нефтяной и газовой промышленности», Российский государственный университет нефти и газа имени И.М. Губкина, г. Москва.
Ершов Михаил Сергеевич, доктор технических наук, профессор, заведующий кафедрой «Теоретическая электротехника и электрификация нефтяной и газовой промышленности», Российский государственный университет нефти и газа имени И.М. Губкина, г. Москва.