



С активным развитием систем технического зрения (СТЗ) для целей автоматизации производственных процессов появляются проблемы выбора и создания алгоритмов для поиска, локализации и идентификации промышленных объектов. Одной из таких проблем является проблема поиска и локализации меток на отслеживаемых объектах, т.к. для правильной работы СТЗ необходимо найти именно то изображение, которое даст наибольший объем полезной информации. В связи с этим на ОАО «Выксунский металлургический завод» (ОАО «ВМЗ») встала проблема разработки методики идентификации производимой продукции.
Исходя из этого, целью данного исследования является разработка и применение алгоритма локализации символьных меток на основе анализа скорости изменения яркости на объектах производственного процесса металлообрабатывающего цеха ОАО «Выксунский металлургический завод». Для достижения поставленной цели необходимо выполнить ряд задач:
1. Проанализировать существующие методы локализации маркировки;
2. Провести анализ методики маркировки, используемой на ОАО «ВМЗ»;
3. Разработать и внедрить алгоритм локализации, основанный на анализе скорости изменения яркости согласно методики маркировки продукции.
Анализ методов локализации изображений
На первом этапе проведен обзор методов локализации маркера на изображениях. На ОАО «ВМЗ» используется методика маркировки изделий с использованием металлических пластин со штрих-кодом типа (Штрих-код Code 39), которые закрепляются на объектах производства – слябах. Пример маркировки слябов показан на рисунке 1.

Рисунок 1 – пример маркера на ОАО «ВМЗ»
В ходе анализа методов локализации были рассмотрены следующие методы:
Метод локализации при помощи окна. Для локализации области номерного знака создается окно, приблизительно равное размеру пластины номерного знака на изображении. Это окно используется, чтобы оценить количество граней во всех областях изображения, имеющих наибольший контраст. Окно накладывается на результирующее изображение в наиболее контрастных зонах. Если количество граней находится в заданном диапазоне, то данная область отмечается как область, возможно содержащая номерной знак. Необходимое количество граней определяется экспериментально. Результат работы этого окна – список возможных областей – кандидатов, в которых может содержаться пластина номерного знака. Основным недостатком этого подхода является то, что процесс выбора кандидата является медленным, поскольку значения всех пикселей в выделенном окне должны быть неоднократно суммированы. Другим недостатком является набор большого количества кандидатов в номерные знаки [1].
Метод, основанный на анализе контура. Задача выделения контуров состоит в построении бинарного изображения, содержащего очертания объектов. Наиболее часто используемый подход к решению задачи обнаружения перепадов на одноцветном изображении. Одним из наиболее очевидных и простых способов обнаружения границ является дифференцирование яркости, рассматриваемой как функция пространственных координат.
Методы, основанные на анализе контуров, позволяют находить номер различного размера (проблема масштабируемости) и под различным наклоном. Однако, у них есть очень важный минус – трудоемкость вычислений, даже на небольшой картинке время обнаружения может достигать нескольких секунд, что неприемлемо. Проход по изображению скользящим окном (например, оператор Собела) сам по себе уже трудоемкая операция, а последующий анализ контуров, которых может быть очень много, добавляет к этому значительную нагрузку [4].
Метод локализации маркера, основанный на поиске всплесков яркости. Основной принцип, положенный в основу метода заключается в том, что алгоритм производит поиск самых ярких областей маркера и производит сглаживание графика яркости при помощи поиска производных первого и второго порядка. Результатом работы алгоритма являются предположительные координаты вертикальных границ маркера [2].
Исходя из того, что работа системы будет происходить в режиме реального времени на ОАО «ВМЗ» с использованием маркеров типа Штрих-код Code 39 можно определить необходимые требования к алгоритму локализации:
1. Алгоритм должен быть устойчив к повороту маркера на угол менее 20 градусов;
2. Работа в мало освещённых помещениях требует от алгоритма работу с малоконтрастными изображениями;
3. Непрерывность работы цеха требует высокой скорости работы алгоритма;
4. Алгоритм должен предоставлять достоверные результаты;
5. Алгоритм должен иметь возможность работы с частично повреждёнными символьными метками.
Согласно заданного метода разработан алгоритм локализации ее на изображении с помощью анализа скорости изменения яркости. Исходя из того, что большая часть маркера состоит из белого цвета, а остальная часть – черного. Это отличительный признак характеризуется сильными скачками яркости от черного к белому и от белого к черному. Следовательно, скачки яркости – это единственный ярко выраженный признак символьной метки на изображении, который целесообразно использовать в работе алгоритма.
Результаты анализа методов по различным критериям сведены в таблицу 1.
Таблица 1 – анализ методов локализации маркировки
|
Показатель |
Метод локализации при помощи окна |
Метод, основанный на анализе контура |
Метод локализации маркера, основанный на поиске всплесков яркости |
Разработанный метод |
|
Локализация повернутых маркеров (до 20 градусов) |
Недостоверный результат |
Достоверный результат |
Достоверный результат |
Достоверный результат |
|
Возможность работы с малоконтрастными изображениями |
Достоверный результат со средне контрастными изображениями |
Достоверный результат со средне контрастными изображениями |
Достоверный результат |
Достоверный результат |
|
Высокая скорость работы |
Низкая |
Средняя |
Средняя |
Высокая |
|
Высокая точность вычислений |
Высокая |
Средняя |
Высокая |
Высокая |
|
Работа с частично поврежденными маркерами |
Достоверный результат при малом повреждении |
Достоверный результат при малом повреждении |
Достоверный результат |
Достоверный результат |
По результатам проведенного исследования можно сделать вывод, что наиболее предпочтительным методом локализации маркера является метод локализации маркера, основанный на поиске всплесков яркости. Единственным его недостатком является то, что вычисление производных и полный перебор пикселей изображения для анализа яркости являются достаточно трудоемкими операциями. Таким образом, за основу алгоритма локализации изображений символьных меток на основе анализа скорости изменения яркости был взят метод локализации маркера, основанный на поиске всплесков яркости.
Разработка алгоритма локализации маркировки
Если сделать горизонтальное сечение изображения и построить график зависимости амплитуды яркости от координаты X, область пластины маркера на графике отразится характерными скачками (рисунок 2).
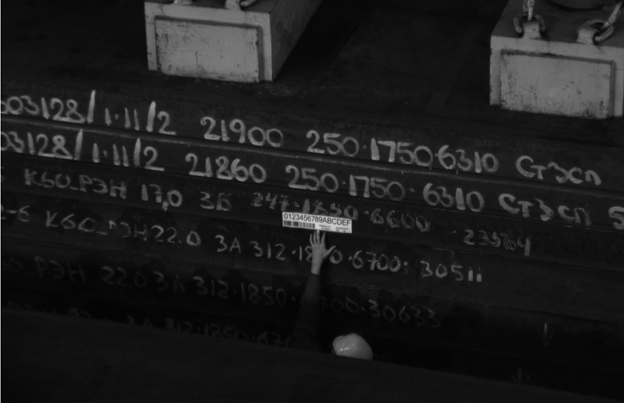
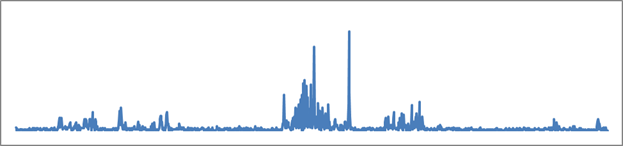
Рисунок 2 – график зависимости амплитуды яркости от координаты X
Данное свойство послужило основой для следующего алгоритма. Изображение сканируется построчно и строится функция следующего вида:
![]() (1)
(1)
где D(i) значение яркости в соответствующем пикселе строки. Функция f(x) в области пластины маркера начнет быстро возрастать (рисунок 3).
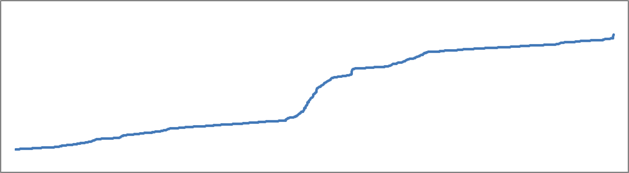
Рисунок 3 – график функции f(x)
После чего производится сглаживание функции f(x) при помощи формулы (2). Полученная функция показана на рисунке 4.
![]() (2)
(2)
где L – предполагаемая ширина пластины маркера.
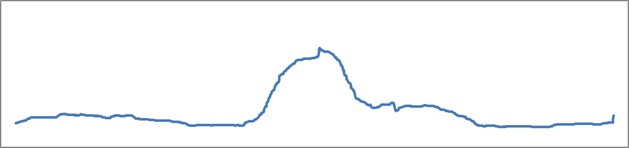
Рисунок 4 – График функции f(x) после процедуры сглаживания
Разработанный метод позволяет с высокой скоростью определить предполагаемые области расположения пластины маркера. Кроме того, необязательно сканировать каждую строчку исходного изображения. Существует возможность задать минимально возможную ширину пластины и проверять сечения сделанные с интервалом в половину минимальной ширины пластины маркера. Это ускорит, и без того быстрый, процесс поиска в несколько раз. Метод абсолютно устойчив к различным шумам, каплям грязи и многих других дефектов, сильно мешавших другим методам. Минусом данного алгоритма является его слабая устойчивость к наклонам (поворотам пластины маркера). В данной задаче этим можно пренебречь, так как сильно перекошенные пластины маркеров (угол более 20 градусов) встречаются крайне редко, а СТЗ ОАО «ВМЗ» предусматривает метод поворота изображения для устранения данной проблемы [3].
Таким образом, входными данными в разработанном алгоритме являются изображение, полученное с производственной камеры и предполагаемая ширина метки на изображении. Работу разработанного алгоритма можно представить последовательностью четырёх шагов:
1. Производится поиск максимального всплеска яркости на изображении путём построчного анализа матрицы яркостей входного изображения. Результатом этого этапа является строка, характеризуемая наибольшим всплеском яркости на изображении;
2. Найденная матрица-строка переводится в матрицу яркости с нарастающим итогом, путём последовательного сложения предыдущего значения матрицы с текущим (формула 1);
3. Производится сглаживание значений в получившейся матрице согласно формуле 2.
4. Находится максимальное значение матрицы, которое является Х-координатой метки.
Результатом работы алгоритма являются координаты расположения метки на изображении.
Вывод
Рассмотренные алгоритмы успешно используются для решения различных задач распознавания образов. Для решения же поставленной задачи ни один из известных, опубликованных методов соответствовал предъявленным требованиям. Поэтому был разработан специальный метод, опирающийся на специфику поставленной задачи. Этот метод решает все проблемы локализации маркера. Он идеально быстр, быстрее в принципе невозможно разработать алгоритм, так как этот метод анализирует только малую часть изображения, не говоря уже о нескольких проходах по всему изображению, которые используются в других алгоритмах. Любой другой алгоритм, анализирующий меньшее количество информации, будет иметь вероятность ошибки (пропустить маркер), так как маркер сможет поместиться вне анализируемой области. Кроме того метод уникально помехоустойчив. Он находит почти любой маркер, который сможет прочитать человек, (исключения составляют лишь маркеры с крайне малой контрастностью < 5%) [5].
Рецензенты:
Жизняков А.Л., д.т.н., профессор, первый заместитель директора Муромский институт (филиал) ФГБОУ ВПО «Владимирский государственный университет им. Александра Григорьевича и Николая Григорьевича Столетовых», г.Муром.
Андрианов Д.Е., д.т.н., заместитель директора по учебной работе, Муромский институт (филиал) ФГБОУ ВПО «Владимирский государственный университет им. Александра Григорьевича и Николая Григорьевича Столетовых», г.Муром.