



При включении в трехфазную сеть мощных однофазных нагрузок появляется несимметрия токов и напряжений. Типичным видом таких нагрузок в промышленности является сварочное оборудование, индукционные печи, тяговые подстанции железнодорожного транспорта, электрифицированного на переменном токе. При этом ухудшается качество электроэнергии и увеличиваются потери энергии [2]. Имеется ряд схем симметрирующих устройств, но накопительный элемент в них чаще всего емкостного типа. Однако современная элементная база позволяет использовать индуктивные накопители энергии. Любую несимметрично загруженную систему можно представить в виде трех систем, систем нулевой, прямой и обратной последовательности фаз [1]. Именно обратная последовательность фаз характеризует степень несимметрии в системе и может быть использована в качестве задающего сигнала для симметрирующего устройства, нормализующего характеристики питающей сети.
По нашему мнению, информации о способах получения управляющих сигналов для симметрирующих устройств, в частности на основе токов обратной последовательности, крайне мало, и данная работа призвана несколько улучшить существующее положение дел.
Соотношения для токов обратной последовательности
Система обратной последовательности состоит из трех векторов ![]() ,
, ![]() ,
, ![]() , равных по величине, угол сдвига между которыми составляет 120°. Причем вектор
, равных по величине, угол сдвига между которыми составляет 120°. Причем вектор ![]() опережает
опережает ![]() на 120°.
на 120°.
![]() (1.1)
(1.1)
где ![]() ,
, ![]()
Для трехпроводной сети при заданных несимметричных токах нагрузки ![]() ,
, ![]() ,
, ![]() токи обратной последовательности фаз
токи обратной последовательности фаз ![]() ,
, ![]() ,
, ![]() равны:
равны:
![]() (1.2)
(1.2)
![]() (1.3)
(1.3)
![]() (1.4)
(1.4)
В любой момент времени сумма токов в трехфазной системе равна нулю (справедливо как для прямой так и для обратной последовательности токов) или ![]() , следовательно, один из них равен сумме двух других не только векторно, но и по мгновенным значениям. Согласно этим соображениям можно получить 6 вариантов, которые иллюстрирует таблица 1. Границами вариантов являются переходы токов через нуль. Все варианты в таблице 1 расположены определенным образом: такое чередование знаков фаз характерно для обратной последовательности тока, считая, что при
, следовательно, один из них равен сумме двух других не только векторно, но и по мгновенным значениям. Согласно этим соображениям можно получить 6 вариантов, которые иллюстрирует таблица 1. Границами вариантов являются переходы токов через нуль. Все варианты в таблице 1 расположены определенным образом: такое чередование знаков фаз характерно для обратной последовательности тока, считая, что при ![]() ток
ток
![]() переходит через нуль [3].
переходит через нуль [3].
Таблица 1
Возможные случаи соотношения токов
|
|
1 |
2 |
3 |
4 |
5 |
6 |
|
|
«+» (>0) |
«+» (>0) |
«+» (>0) |
«-» (<0) |
«-» (<0) |
«-» (<0) |
|
|
«+» (>0) |
«-» (<0) |
«-» (<0) |
«-» (<0) |
«+» (>0) |
«+» (>0) |
|
|
«-» (<0) |
«-» (<0) |
«+» (>0) |
«+» (>0) |
«+» (>0) |
«-» (<0) |
Способ получения управляющих сигналов для системы управления симметрирующим устройством на основе токов обратной последовательности
Рассмотрим способ получения управляющих сигналов соответствующих токам обратной последовательности ![]() ,
, ![]() ,
, ![]() по соотношениям (1.2-1.4) при реализации его на микроконтроллере, работающем с частотой 12,6 кГц. В трехфазной сети без нулевого провода промышленной частоты за один период тока (при
по соотношениям (1.2-1.4) при реализации его на микроконтроллере, работающем с частотой 12,6 кГц. В трехфазной сети без нулевого провода промышленной частоты за один период тока (при ![]() ) измеряются мгновенные значения токов нагрузки
) измеряются мгновенные значения токов нагрузки ![]() ,
, ![]() ,
, ![]() − 252 измерения за период. Для каждого из токов нагрузки создается одномерный массив размерностью 253 элемента. Измеренные токи нагрузки сохраняются в соответствующем ему одномерном массиве. Такие массивы данных можно рассматривать как циклический буфер, при переполнении массивов в них последовательно записываются новые мгновенные значения токов нагрузки
− 252 измерения за период. Для каждого из токов нагрузки создается одномерный массив размерностью 253 элемента. Измеренные токи нагрузки сохраняются в соответствующем ему одномерном массиве. Такие массивы данных можно рассматривать как циклический буфер, при переполнении массивов в них последовательно записываются новые мгновенные значения токов нагрузки ![]() ,
, ![]() ,
, ![]() .
.
Далее для получения токов обратной последовательности ![]() ,
, ![]() ,
, ![]() по соотношениям (1.2-1.4) из массива данных извлекаются значения токов нагрузки, соответствующие тому оператору трехфазной системы, на который в соотношении (1.2-1.4) умножается ток нагрузки. Например, чтобы получить выражение
по соотношениям (1.2-1.4) из массива данных извлекаются значения токов нагрузки, соответствующие тому оператору трехфазной системы, на который в соотношении (1.2-1.4) умножается ток нагрузки. Например, чтобы получить выражение ![]() из соотношения 1.2, необходимо вектор
из соотношения 1.2, необходимо вектор ![]() повернуть против часовой стрелки на угол 240° или по часовой стрелке на 120°. Если бы за период тока
повернуть против часовой стрелки на угол 240° или по часовой стрелке на 120°. Если бы за период тока ![]() проводилось 360 измерений, то выражение
проводилось 360 измерений, то выражение ![]() можно было получить, извлекая из циклического буфера измерение
можно было получить, извлекая из циклического буфера измерение ![]() тока нагрузки
тока нагрузки ![]() , если в данный момент производится измерение
, если в данный момент производится измерение ![]() или последующее измерение тока
или последующее измерение тока ![]() . На всех измерениях тока
. На всех измерениях тока ![]() до измерения
до измерения ![]() выражение
выражение ![]() можно было бы получить, извлекая из циклического буфера измерение
можно было бы получить, извлекая из циклического буфера измерение ![]() тока
тока ![]() . Здесь под измерением
. Здесь под измерением ![]() понимается
понимается ![]() измерение тока
измерение тока ![]() в прошедшем периоде тока нагрузки
в прошедшем периоде тока нагрузки ![]() .
.
Но так как за период тока ![]() проводится только 252 измерения, то оператор трехфазной системы
проводится только 252 измерения, то оператор трехфазной системы ![]() будет соответствовать извлечению из буфера данных измерения
будет соответствовать извлечению из буфера данных измерения ![]() в текущем периоде тока нагрузки. Оператору трехфазной системы
в текущем периоде тока нагрузки. Оператору трехфазной системы ![]() соответствует извлечение из циклического буфера измерения
соответствует извлечение из циклического буфера измерения ![]() в текущем периоде тока нагрузки или измерения
в текущем периоде тока нагрузки или измерения ![]() в прошедшем периоде тока нагрузки.
в прошедшем периоде тока нагрузки.
Например, выражение ![]() из соотношения 1.2 получается извлечением из циклического буфера измерения
из соотношения 1.2 получается извлечением из циклического буфера измерения ![]() , начиная с измерения
, начиная с измерения ![]() тока
тока ![]() , или извлечением из циклического буфера измерения
, или извлечением из циклического буфера измерения ![]() в остальных случаях.
в остальных случаях.
Аналогично, для получения выражения ![]() из соотношения 1.2 необходимо извлечь из циклического буфера измерение
из соотношения 1.2 необходимо извлечь из циклического буфера измерение ![]() тока
тока ![]() на измерении
на измерении ![]() и последующих измерениях тока
и последующих измерениях тока ![]() . На всех измерениях до измерения
. На всех измерениях до измерения ![]() выражение
выражение ![]() из соотношения 1.2 получается извлечением из циклического буфера измерения
из соотношения 1.2 получается извлечением из циклического буфера измерения ![]() (измерение
(измерение ![]() предыдущего периода тока
предыдущего периода тока ![]() ).
).
Таким образом, токи обратной последовательности ![]() ,
, ![]() ,
, ![]() вычисляются после каждого измерения токов нагрузки
вычисляются после каждого измерения токов нагрузки ![]() ,
, ![]() ,
, ![]() – 252 измерения за 20 мс, т. е. частота измерений 12,6 кГц. Это дает возможность симметрирующему устройству мгновенно реагировать на изменение несимметричной нагрузки в ходе производственного процесса.
– 252 измерения за 20 мс, т. е. частота измерений 12,6 кГц. Это дает возможность симметрирующему устройству мгновенно реагировать на изменение несимметричной нагрузки в ходе производственного процесса.
Практическая реализация способа получения управляющих сигналов
На рисунке 1 представлена электрическая схема блока переключения транзисторов, где на рисунке 1a QF1 − вводной трехфазный автоматический выключатель, R1 − резистор (однофазная нагрузка), ACS712 − датчик тока [6], LM358 – усилитель; на рисунке 1б LM7805 − регулятор положительного напряжения 12/5 В; на рисунке 1в X6 – выход программатора; на рисунке 1г VH 6,7,8 – светодиодные индикаторы; на рисунке 1г ATMEGA32A-TQFP44 − микроконтроллер [7]; на рисунке 1д DH1 – цифровой индикатор. К отходящим фазам A, C трехфазного вводного автомата QF1 подключен резистор R1, на котором датчиком ACS712 измеряется ток и далее через схему усиления LM358 передается микроконтроллеру ATMEGA32A-TQFP44. Мгновенное значение тока отображается на цифровом индикаторе DH1. Микроконтроллером в соответствии с управляющей программой на языке ANSI C [5] вычисляются токи обратной последовательности и вырабатываются управляющие воздействия на IGBT-транзисторы KEY1-6. На макетной плате сделаны выводы KEY1-6 для соответствующих транзисторов. Осциллограммы управляющих сигналов с выводов KEY1-6 приведены на рисунках 2а-б.
Из рисунка 2а-б видно, что в момент времени ![]() мс длится вариант 1 из таблицы 1. Системой управления [4] формируется управляющий сигнал на включение транзистора №6 (рисунок 2е), переключение транзисторов № 1 (рисунок 2а) и № 2 (рисунок 2б) для потребления тока из фаз А и B и отдача в фазу С. Далее последовательно происходит формирование управляющих сигналов в соответствии с другими возможными соотношениями токов из таблицы 1.
мс длится вариант 1 из таблицы 1. Системой управления [4] формируется управляющий сигнал на включение транзистора №6 (рисунок 2е), переключение транзисторов № 1 (рисунок 2а) и № 2 (рисунок 2б) для потребления тока из фаз А и B и отдача в фазу С. Далее последовательно происходит формирование управляющих сигналов в соответствии с другими возможными соотношениями токов из таблицы 1.
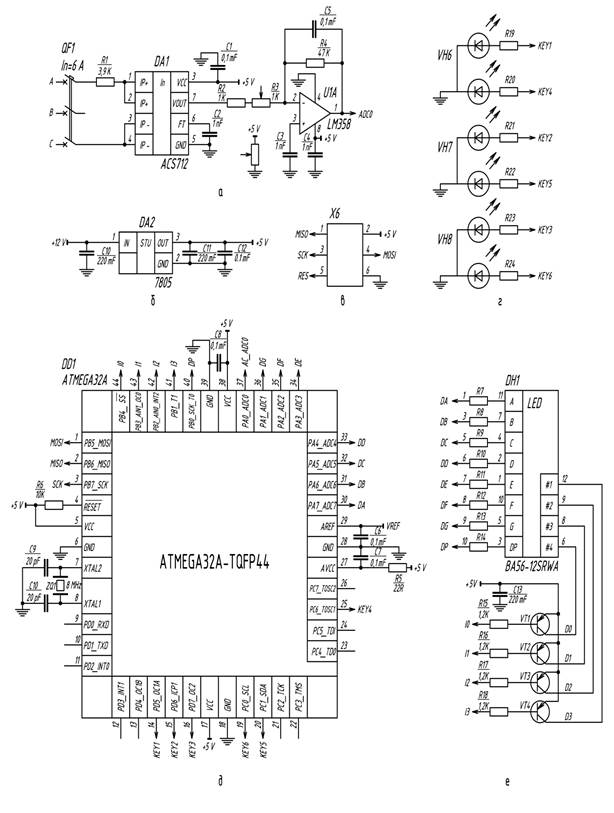
Рис. 1. Тестовая схема блока переключения транзисторов симметрирующего устройства
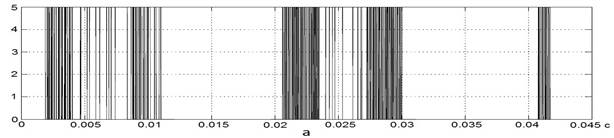
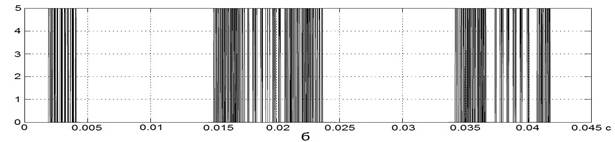
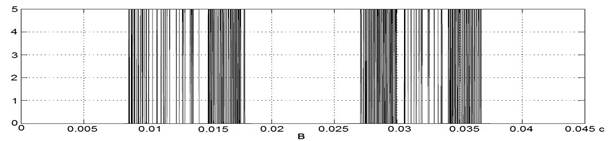
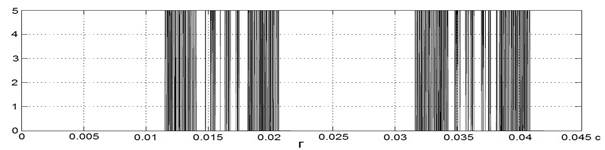
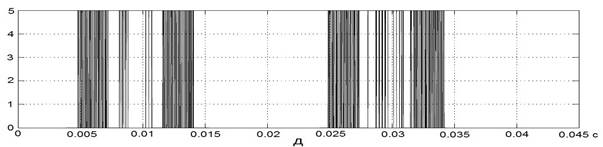
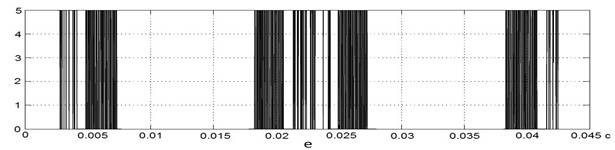
Рис. 2. Осциллограммы формы управляющих сигналов микроконтроллера за 0,045с («5» – включено, «0» – выключено) для KEY1-6 на рисунке 1 (а-1, б-2, в-3, г-4, д-5, е-6)
В ходе экспериментального исследования получены осциллограммы управляющих сигналов на основе вычисленных токов обратной последовательности. Данные управляющие сигналы далее поступают на драйверы IGBT-транзисторов, которые осуществляют управляемый энергообмен между сетью и дросселем. Изложенный выше способ получения управляющих сигналов подтвердил свою работоспособность и высокое быстродействие.
Рецензенты:
Гизатуллин Ф.А., д.т.н., профессор, профессор кафедры электромеханики, кафедра электромеханики ФГБОУ ВПО Уфимского государственного авиационного технического университета, г. Уфа;
Шапиро С.В., д.т.н., профессор, заведующий кафедрой физики, кафедра физики ФГБОУ ВПО Уфимского государственного университета экономики и сервиса, г. Уфа.