



В настоящее время, в связи с необходимостью развития промышленности, требуется введение новых наукоемких технологий по контролю движения продукции. Реализация такого контроля возможна с помощью внедрения систем автоматической идентификации и распознавания. От степени совершенства работы системы контроля движения продукции зависит эффективность производства в целом. Поэтому решение задач управления на промышленных предприятиях, состоящих в разработке новых и совершенствовании существующих методов и средств обработки информации, с целью повышения эффективности систем контроля движения продукции имеет важное значение [3; 4; 7].
Для контроля движения продукции используются маркировки промышленных изделий. На новейших промышленных предприятиях контроль движения продукции осуществляется специализированными средствами – системами автоматической идентификации маркировки (САИМ). Основная сложность при использовании САИМ заключается в задаче локализации промышленной продукции, которую усложняют наличие неравномерной освещенности и резкости (засвечивание изображения искусственным и солнечным светом, неверная настройка фокуса), присутствие шумов и размытий, а также образов производственных сооружений и агрегатов (рис. 1). Автоматизация этой сферы деятельности является мало проработанной и зачастую выполняется вручную [1; 5; 6; 8].
Целью исследования является разработка и внедрение алгоритма локализации маркировок промышленных изделий на основе двумерного рекуррентного поиска усредненного максимума для повышения достоверности идентификации систем автоматической идентификации маркировок на малоконтрастных цифровых изображениях.
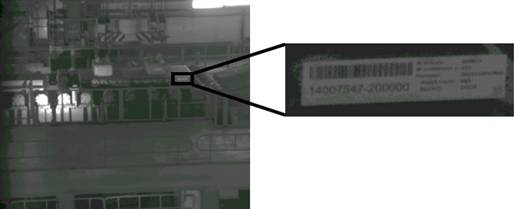
Рис. 1. Пример изображения, обрабатываемого в САИМ.
Разработка алгоритма локализации маркировок промышленных изделий на основе двумерного рекуррентного поиска усредненного максимума
Для разработки алгоритма локализации на основе рекуррентного поиска усредненного максимума было разработано математическое описание этого метода [9; 11].
Пусть f(x) – это функция яркости изображения, тогда для локализации промышленной маркировки рекуррентным поиском усредненного максимума необходимо выполнить следующие математические операции. Графически рекуррентный поиск усредненного максимума представлен на рисунке 2.
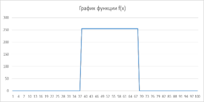


Рис. 2. Рекуррентный поиск усредненного максимума.
В непрерывном пространстве усредненный максимум х0 определяется следующим образом:
![]()
![]()
![]()
В дискретном пространстве исходная функция представлена в виде массива F, и необходимо найти усредненный максимум х0:

![]()
![]()
Для увеличения быстродействия реализация данных формул возможна рекуррентным способом. В рекуррентном виде координата x0 определяется как:
![]()
![]()
![]()
Результатом работы алгоритма является координата точки х0, в которой значение результирующей функции p(x) максимально. Соответственно х0 является координатой локализуемого объекта [2; 10].
В процессе эксплуатации САИМ в поле зрения промышленных камер могут попадать искусственные и естественные источники света, образы производственных сооружений и агрегатов, а также, в силу физических взаимодействий, может расстраиваться фокус. Наличие этих условий снижает достоверность идентификации промышленных изделий.
Для повышения достоверности локализации промышленных изделий на сильно зашумленных цифровых изображениях предложен алгоритм локализации маркировок на основе двумерного рекуррентного поиска усредненного максимума.
Пусть f(x,y) – это функция яркости изображения, тогда для локализации промышленной маркировки двумерным усреднением данных рекуррентного поиска усредненного максимума необходимо выполнить следующие математические операции.
В непрерывном пространстве координата маркировки х0, y0 определяется следующим образом:
![]()
![]()
![]()
![]()
![]()
В дискретном пространстве исходная функция представлена в виде массива F, и необходимы координаты х0, y0:

![]()

![]()
![]()
Для увеличения быстродействия реализация данных формул возможна рекуррентным способом. В рекуррентном виде для определения координат х0, y0 массив F преобразуется по формуле:
![]()
![]()
![]()
![]()
![]()
Результатом работы алгоритма являются координаты точки х0, y0, в которой значение результирующей функции p(x,y) максимально. Соответственно эти координаты являются точкой местоположения локализуемой маркировки промышленного изделия.
Экспериментальные исследования
Результаты проведенных в работе исследований внедрены в систему автоматической идентификации маркировки на промышленном предприятии ОАО «Выксунский металлургический завод» (г. Выкса) для контроля движения изделий на складе слябов и заготовок. По результатам проведенных исследований достоверность идентификации маркировки составила 96-98%. Время идентификации составило от 10 до 14 секунд, что соответствует предъявленным требованиям к оперативности работы.
Примеры работы разработанного алгоритма представлены на рисунках 3 и 4.
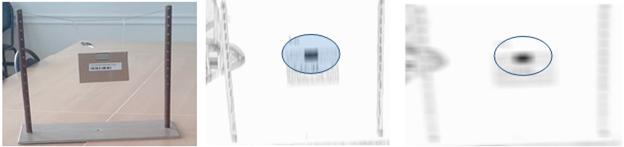
Рис. 3. Пример работы алгоритма локализации в лабораторных условиях.
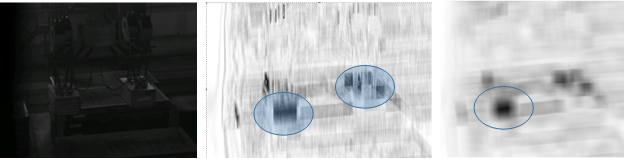
Рис. 4. Пример работы алгоритма локализации в промышленных условиях.
Качество работы систем автоматической идентификации маркировки характеризуется вероятностями идентификации. При идентификации промышленных объектов возможно появление двух типов ошибок. Ошибка первого рода связана с возможностью не идентифицировать промышленный объект, который на самом деле находится в области видимости камеры. Ошибка второго рода отражает случаи, когда система идентифицирует промышленный объект, на самом деле не имеющий маркировки. Для современных систем распознавания лица типичное значение вероятности правильного распознавания, как правило, находится в диапазоне от 80 до 97%, при ошибке второго рода, не превышающей 2%. В случае с САИМ оценка вероятности возникновения ошибки первого рода составляет 0,95-2,82%, а второго рода – 0,2-0,4%.
Работа выполнена при поддержке гранта РФФИ № 13-07-00845 и в рамках выполнения государственного заказа.
Рецензенты:
Жизняков А.Л., д.т.н., профессор, первый заместитель директора Муромского института (филиала) ФГБОУ ВПО «Владимирский государственный университет им. Александра Григорьевича и Николая Григорьевича Столетовых», г. Муром.
Орлов А.А., д.т.н., заместитель директора по развитию электронного обучения и дистанционных образовательных технологий Муромского института (филиала) ФГБОУ ВПО «Владимирский государственный университет им. Александра Григорьевича и Николая Григорьевича Столетовых», г. Муром.