



При буровзрывном и комбайновом способах проведения подготовительных выработок конечный результат определяется количеством горной массы, выданной из забоя в единицу времени, поэтому погрузка и призабойный транспорт являются неотъемлемой частью технологического цикла. Этим должна оцениваться существенная роль погрузочных органов в общем комплексе горнопроходческого оборудования.
На угольных шахтах России и за рубежом для уборки горной массы в проходческих забоях широко используются погрузочные органы непрерывного действия (ПОНД). Машины с нагребающими лапами в течение многих лет активно модернизируются, улучшаются их параметры, изменяются конструкция и кинематические характеристики. Появились новые погрузочные органы с парными клиновыми элементами, совершающими возвратные движения. В последние годы в мировом комбайностроении широкое распространение находят погрузочные органы, выполненные в виде парных вращающихся звёзд и отличающиеся большим разнообразием конструкций.
К настоящему времени, в теоретическом и практическом аспектах разработаны многочисленные варианты ПОНД проходческих машин – комбайнов, погрузочных машин, агрегатированных комплексов. Количество авторских свидетельств и патентов, посвященных ПОНД, измеряется многими десятками, хотя практическое применение в течение многих лет находят лишь отдельные технические решения. Остро стоит вопрос об оценке рабочих качеств ПОНД, их возможной производительности, энергоемкости, надежности и других характеристик. В настоящей статье впервые сделана попытка решить методические вопросы сопоставительного анализа конструктивных схем ПОНД, которые используются и в перспективе могут применяться на погрузочных машинах и проходческих комбайнах. Многочисленность вариантов ПОНД делает актуальным, прежде всего, создание приемлемой системы их классификации.
Разнообразие конструктивно-кинематических схем и классификация ПОНД
Ниже рассматриваются погрузочные органы горных машин, которые в соответствии с классификационными признаками, изложенными в работах [24, 25], обладают следующими свойствами: сохраняют при погрузке контакт со штабелем; имеют преимущественно боковой способ захвата с расположением парных рабочих элементов на наклонной плите; обслуживают фронт забоя путем маневрирования корпуса машины, на котором они смонтированы; сохраняют постоянный контакт с последующим транспортным устройством при передаче на него груза.
Термин «Погрузочный орган непрерывного действия» присваивают погрузочным устройствам, которые выполняют свои функции захвата, транспортирования сыпучего или кускового материала и разгрузки на транспортное средство без технологических перерывов для возвращения рабочего элемента в исходное положение. Непрерывность функционирования обеспечивается наличием двух или более рабочих элементов – нагребающих лап, гребков, лучей и т.д. Чем больше число рабочих элементов, тем значительнее проявляется эффект непрерывности погрузки. С этой точки зрения, «идеально непрерывным» можно назвать погрузочный орган с так называемыми рифлеными дисками [16], в котором расстояние между соседними нагребающими элементами – минимально, а их число измеряется десятками.
Учитывая вышеперечисленные ограничения, к рассматриваемым ПОНД необходимо отнести симметричные конструкции, имеющие рабочие элементы с приводом и трансмиссией, расположенные по обе стороны от оси горной машины (погрузочной машины, проходческого комбайна и т.п.). Анализируя известные технические решения, реализованные на погрузочных машинах и проходческих комбайнах, а также, заявленные в изобретениях, к числу главных классификационных признаков необходимо отнести следующие:
а) кинематический: с непрерывным движением без реверсирования рабочих элементов - вращательное, плоское движения; с возвратным движением – возвратно-вращательное, возвратно-поступательное и плоское с возвратным движением; первая группа ПОНД снабжена так называемыми традиционными, вторая – клинообразными в поперечном сечении погрузочными элементами;
б) число рабочих элементов, расположенных по одну сторону от оси симметрии: одно- и многогребковые;
в) энергетический - вид первичной энергии, передаваемый непосредственно или через трансмиссию на рабочие элементы: электрические, гидравлические;
г) вид трансмиссии: механическая; с использованием силовых гидроцилиндров;
д) дополнительные признаки: свойства рабочего стола: стационарный, неизменный по ширине; с дополнительными уширителями, монтируемыми по необходимости; с расширяющимся столом-питателем; способ синхронизации движения нагребающих элементов и др.
С точки зрения основной области применения ПОНД целесообразно разделить на две основные конструктивные группы: для погрузочных машин; для проходческих комбайнов. Первая группа, как правило, имеет ширину питателя, обслуживаемую двумя элементами-лапами без дополнительных устройств для расширения фронта погрузки, то есть, без дополнительной группы лап, съемных или стационарных расширителей наклонной плиты. Вторая группа может иметь дополнительные устройства для расширения фронта погрузки (табл.1).
Как видно из таблицы, известные к настоящему времени ПОНД могут быть условно разделены на 5 основных групп, две из которых относятся к погрузочным машинам, три – к проходческим комбайнам избирательного действия. Дальнейшее деление групп на подгруппы может быть продолжено при появлении новых дополнительных конструктивных или кинематических признаков. Таким образом, информация, приведенная в табл.1, не ограничивает дальнейшее развитие и совершенствование конструкций ПОНД. Она лишь проводит основные границы между различными группами ПОНД, для которых должны разрабатываться методы расчета и выбора основных параметров.
Таблица 1
ПОНД, реализованные в проходческих машинах и заявленные в изобретениях
|
№ |
Основные признаки ПОНД |
Дополнительные признаки |
Источник |
|
1 |
2 |
3 |
4 |
|
1. ПОНД с традиционными нагребающими лапами для погрузочных машин |
|||
|
1.1 |
а) плоское непрерывное движение; б) два рабочих элемента; в) привод - электро- или гидродвигатели; г) механическая трансмиссия |
Кривошипно-кулисный механизм; синхронизирующий вал или общий редуктор двух лап (рис.1, а) |
[18] |
|
Поверхность гребка выполнена по логарифмической спирали |
[1] |
||
|
Нагребающая лапа шарнирно соединена с ползуном, установленным в направляющей |
[2] |
||
|
Двухкривошипный механизм; синхронизирующий вал или общий редуктор двух лап (рис.1,б) |
[18] |
||
|
Наличие на гребке и кулисе с внешней стороны клиновой поверхности |
[3] |
||
|
Наличие клиновой поверхности с регулируемым в процессе взаимодействия с породой углом наклона клиновой поверхности |
[4] |
||
|
1.2 |
а) и б) аналогичны п.1.1; в) и г) привод ведущих дисков прямой от силовых гидроцилиндров |
Синхронизация положения лап со сдвигом по фазе на 180 градусов осуществляется через дополнительный поперечно установленный гидроцилиндр Двухкривошипный механизм; синхронизирующий вал или общий редуктор двух лап (рис.1,б) |
[5] |
|
Cинхронизация положения лап со сдвигом по фазе на 180 градусов осуществляется с помощью синхронизирующего вала |
[19] |
||
|
1.3 |
а) и б) аналогичны п.1.1; в) и г) привод лап прямой от 4-х силовых гидроцилиндров |
Два гидроцилиндра подачи лап смонтированы в корпусах нагребающих лап, два других – выполняют функцию поворота лап. Синхронизация положения лап - гидравлическая. |
[20] |
|
1.4 |
а), б), в) и г) аналогичны п.1.1; |
Установлен дополнительный гидроцилиндр и рычаг, обеспечивающие возможность изменения траектории движения лапы. |
[6] |
|
2. ПОНД с клиновыми нагребающими лапами для погрузочных машин |
|||
|
2.1 |
а) движение плоское возвратное; б) два рабочих элемента; в) и г) привод - от двух силовых гидроцилиндров без промежуточной трансмиссии |
Каждая лапа приводится в движение от гидроцилиндра, смонтированного в корпусе лапы. Синхронизация движения лап осуществляется гидравлически (рис.2,а) |
[7] |
|
2.2 |
а) движение возвратно-поворотное б) – аналогично п.2.1; в) и г) привод - от одного силового гидроцилиндра без промежуточной трансмиссии |
Силовой гидроцилиндр возвратно-поступательного действия с двумя штоками. Синхронизация положения лап осуществляется механически через общий гидроцилиндр привода (рис.2, б) |
[8] |
|
Силовой гидроцилиндр возвратно-поворотного действия (моментный гидроцилиндр). Синхронизация положения лап осуществляется механически через соединительную цепь |
[9] |
||
|
2.3 |
а) движение возвратно–поступательное; б) – аналогично п.2.1; в) и г) привод - от одного силового гидроцилиндра без промежуточной трансмиссии |
Синхронизация положения лап осуществляется механически через общий гидроцилиндр |
|
Продолжение табл.1
|
1 |
2 |
3 |
4 |
|
2.4 |
а) движение возвратно-поворотное; б) – аналогично п.2.1; в) и г) привод - от одного силового гидроцилиндра с двумя штоками без промежуточной трансмиссии |
Нагребающая лапа выполнена двухсекционной. Дополнительный гребок совершает также возвратно-поворотное движение от гидроцилиндра, смонтированного в корпусе основной лапы. Синхронизация положения лап осуществляется через общий силовой гидроцилиндр |
[11] |
|
3. ПОНД с традиционными нагребающими лапами или нагребающими звездами для проходческих комбайнов |
|||
|
3.1 |
а) плоское непрерывное движение; б) четыре рабочих элемента; в) привод - электро- или гидродвигатели; г) механическая трансмиссия |
Кривошипно-кулисный механизм; синхронизирующий вал или общий редуктор двух лап (рис.3,а) |
[17] |
|
Двухкривошипный механизм; синхронизирующий вал или общий редуктор двух лап (рис.3,б) |
[21] |
||
|
3.2 |
а) движение вращательное – непрерывное; б) число элементов с каждой стороны 3…6 - многогребковые лучи; в) привод - электро- или гидродвигатели; г) механическая трансмиссия |
Синхронизация положения звезд, как правило, не предусматривается (рис. 4) |
[23] |
|
4. ПОНД с клиновыми нагребающими лапами для проходческих комбайнов |
|||
|
4.1 |
а) движение плоское, возвратное; б) число элементов с каждой стороны - 3 и более; в) и г) привод - от двух силовых гидроцилиндров, смонтированных внутри промежуточных элементов) без промежуточной трансмиссии |
Синхронизация движения лап осуществляется гидравлически |
[12] |
|
4.2 |
а) движение вращательное возвратное; б) число элементов с каждой стороны - 3 и более; в) и г) привод - от двух силовых гидроцилиндров, смонтированных на наклонной плите без промежуточной трансмиссии |
Синхронизация движения лап осуществляется гидравлически (рис.5) |
[13] |
|
4.3 |
а) движение возвратно-поступательное; б) число элементов с каждой стороны 2 и более; в) привод от гидроцилиндра двойного действия и механическую передачу |
Синхронизация движения лап осуществляется через общий силовой гидроцилиндр |
[14] |
|
4.4 |
а) движение возвратное вращательное; б) число элементов с каждой стороны - по одному; в) привод каждой лапы от отдельного цилиндра |
Синхронизация движения лап осуществляется гидравлически. рабочий стол обладает способностью к расширению. Изменение ширины производится усилием, прикладываемым со стороны нагребающих лап. |
[15] |
|
5. ПОНД комбинированного типа: с клиновыми лапами и нагребающими звездами |
|||
|
5.1 |
а) движение лап - возвратно- вращательное; движение нагребающих звезд - вращательное; б) число элементов с каждой стороны _по 2; привод лап от одного гидроцилиндра с двумя штока; привод звезд - от гидро - или электродвигптеля через механическую трансмиссию |
Синхронизация движения лап осуществляется через общий силовой гидроцилиндр. Синхронизация звезд - не требуется |
[22] |
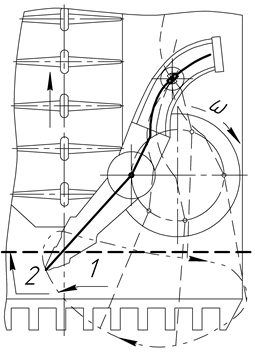
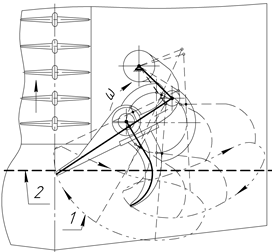
Ниже приводятся конструктивно-кинематические схемы ПОНД (рис. 1-5), реализованные в серийных, опытных образцах погрузочных машин или проходческих комбайнов. С остальными разновидностями ПОНД можно ознакомиться в описаниях к авторским свидетельствам (АС) или патентам, список которых приведен в конце статьи. На рисунках обозначено: 1 – траектория передней кромки нагребающего элемента; 2 – условная линия начала штабеля горной массы.
 а)
а)
 б)
б)
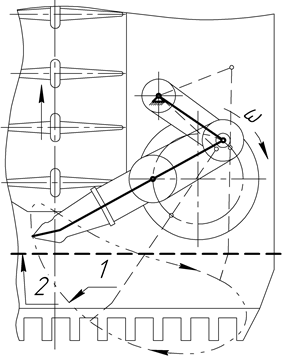
Рис. 1. Погрузочный орган погрузочной машины с парными нагребающими лапами по признакам П.1.1 с механизмом перемещения лап: а – кривошипно-кулисным; б – двухкривошипным.
 а)
а)
 б)
б)
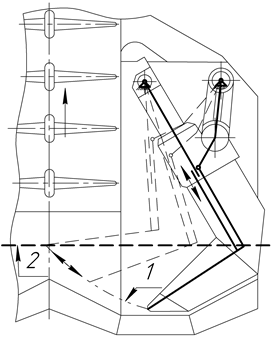
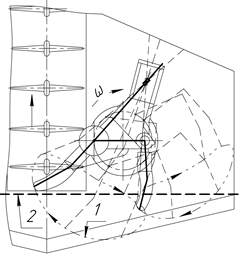
Рис.2. Погрузочный орган погрузочной машины с парными клиновыми нагребающими лапами: а – по признакам П.2.1 – с индивидуальными гидроцилиндрами в корпусах лап;
б – по признакам П.2.2 – с единым гидроцилиндром с двумя штоками.
 а)
а)
 б)
б)
Рис.3. Погрузочный орган с парными нагребающими лапами проходческого комбайна по признакам П.3.1 с механизмами перемещения лап: а - кривошипно-кулисным; б – двухкривошипным.
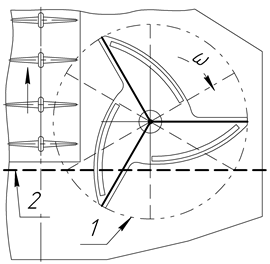
Рис.4. Погрузочный орган с парными нагребающими звездами проходческого комбайна по признакам П.3.2
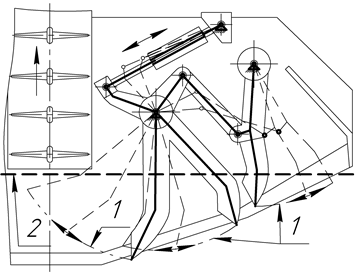
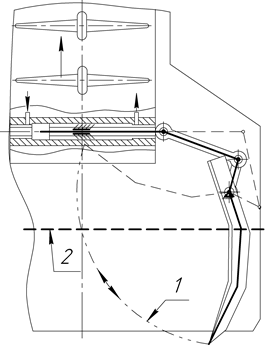
Рис.5. Погрузочный орган с парными клиновыми нагребающими лапами проходческого комбайна по признакам П.4.2.
На каждом из рисунков приведена в схематизированном представлении конструкция ПОНД (вид сверху, расположение на приемной плите), кинематическая схема и положения нагребающих элементов–лап в процессе захвата единичной порции материала: внедрение в штабель, зачерпывание с проталкиванием порции материала и возвращение в исходное положение. Эти позиционные схемы являются основой для расчета показателей ПОНД: объема единичного захвата, сил сопротивлений движению лапы в штабеле – статических и динамических, энергоемкости процесса.
В схемах с традиционными лапами, совершающими непрерывное замкнутое движение, обратный ход происходит по части траектории, отличающейся от рабочего хода. При этом, если режим погрузки реализуется без превышения определенной глубины внедрения, то лапа при обратном ходе движется вне контакта с погружаемой массой. Иная принципиально физическая картина реализуется на ПОНД с клиновыми лапами. Траектории рабочего и обратного хода нагребающего элемента совпадают, движение лапы заостренной частью в обратном направлении происходит внутри массива погружаемой породы. Это может вызвать повышение удельной энергоемкости процесса. Вместе с тем, ПОНД с клиновыми лапами обладают более простой конструкцией, имеют исполнение без промежуточной трансмиссии, что повышает, по-видимому, показатели работоспособности и ремонтопригодности. Необходимы специальные комплексные исследования сравнительной эффективности ПОНД с традиционными и клиновыми рабочими элементами, обладающими различной совокупностью классификационных признаков. Результаты этих исследований планируются к публикации в очередных статьях.
Рецензенты:
Евстратов В.А., д.т.н., профессор, декан Технологического факультета Шахтинского института (филиала) ЮРГПУ (НПИ) им. М.И. Платова, г. Шахты.
Адигамов К.А., д.т.н., профессор, заведующий кафедрой «Прикладная механика и конструирование машин» Института сферы обслуживания и предпринимательства (филиала) ФГБОУ «ДГТУ», г. Шахты.