



Введение
Задачи управления роботами, когда работа должна осуществляться в заранее известной среде функционирования, успешно решаются с применением методов теории конечных автоматов [1], сетей Петри [8] и другие представлений дискретной математики [6]. В случаях, когда возможно составить решаемые дифференциальные уравнения, в использовании данных методов и методик, основанных на искусственном интеллекте, нет необходимости.
Значительно сложнее управлять роботами, работающими в экстремальных условиях, в заранее неизвестной обстановке [10]. Например, при спасательных операциях, при обезвреживании взрывоопасных предметов, во время дистанционно выполняемых хирургических операций. Здесь все движения робота задаются непосредственно человеком-оператором. К перечисленным сферам применения следует отнести и движение робота в трубопроводах или газопроводах, если точные параметры труб заранее неизвестны.
Цель исследования
Целью данной работы является разработка методики ситуационного управления роботом для решения задач движения мобильного диагностического робота в газопроводной сети.
Применение мобильных роботов в данном процессе позволит осуществлять диагностику без вскрытия трубопроводов, что существенно облегчит работу технических специалистов [3]. Конструкция рассматриваемого робота для перемещения диагностических устройств представляет собой роботизированный комплекс с трехопорной лучеобразной кинематикой [2]. Основным достоинством данной конструкции является возможность преодоления наклонных и вертикальных участков трубопроводов.
Формирование нечеткой ситуации
Базовым понятием нечеткого ситуационного управления является термин «ситуация управления». Главная функция ситуации состоит в выработке правил, по которым будут определяться последовательности управляющих воздействий на исполнительные механизмы.
На основе данных, поступающих от сенсорной подсистемы мобильного робота [4], производится формирование нечетких ситуаций, которые представляют собой набор значений признаков, описывающих состояние объекта управления в некоторый момент времени. Признаки представляют собой набор внутренних характеристик самого диагностического робота и характеристики трубопровода. Для верного определения важных признаков необходимо учесть трудности (прецеденты), которые предстоит преодолевать мобильному роботу в процессе его функционирования внутри трубопровода. Данные прецеденты выявлены и рассмотрены в работах [5; 9].
Для составления нечетких ситуаций процесса проведения внутритрубной диагностики мобильным колесным роботом используются следующие признаки:
1. y1 – угол наклона трубопровода относительно горизонтали. <”Наклон трубопровода”,T1, D1>;
T1={”сильно вверх”,”вверх”,”горизонт”,”вниз”,”сильно вниз”};
D1={–90º, –80º, –70º… 80º, 90º}.
Учитывая то, что при значениях «Вниз» и «Вверх», так же как и «Сильно вниз» и «Сильно вверх» роботу необходимо прикладывать аналогичные усилия упора в стенку трубопровода, то число термов возможно сократить до трех: ”горизонт”(![]() ),”вниз”(
),”вниз”(![]() ),”сильно вниз”(
),”сильно вниз”(![]() ).
).
2. y2 – внутренний диаметр трубопровода. <”Диаметр трубопровода”,T2, D2>;
T2={”малый”,”средний”,”большой”};
D2={dроб.min… dроб.max};
где dроб.min – робот в максимально сжатом положении, dроб.max – робот в максимально разжатом положении.
3. y3 – направление движения робота в трубопроводе. <”Целеуказание”,T3 >;
T3={”влево”,”вправо”, ”прямо”,”вверх”,”вниз” }.
4. y4 – радиус поворота трубопровода. <”Радиус поворота”,T4, D4>;
T4={”малый”,”большой”,”очень большой”}, D4 ={rроб.min…![]() },
},
где rроб.min – минимально возможный радиус поворота, который робот способен преодолеть, радиус поворота равен ![]() на прямолинейном участке трубопровода.
на прямолинейном участке трубопровода.
5. y5 – скорость вращения 1-го колесного модуля робота.
<”Скорость 1–го колесного модуля”,T5, D5>;
T5={”малая”,”средняя”,”большая”};
D5={vmin… vmax};
где vmin – минимальная скорость вращения;
vmax – максимальная скорость вращения.
6. y6 – скорость вращения 2-го колесного модуля робота.
<”Скорость 2–го колесного модуля”,T6, D6>;
T6={”малая”,”средняя”,”большая”}, D6={vmin… vmax}.
7. y7 – скорость вращения 3-го колесного модуля робота.
<”Скорость 3–го колесного модуля”,T7, D7>;
T7={”малая”,”средняя”,”большая”}, D7={vmin… vmax}.
8. y8 – ориентация колесных роботов относительно вертикали.<”Ориентация”,T8, D8>;
T8={”малый”,”средний”,”большой”}, D8={0º… 360º}.
В случае значения T8={”малый”} принимается, что колесный модуль 1 находится сверху, при T8={”средний”} – колесный модуль 3 сверху, а при T8={”большой”} – колесный модуль 2.
Приведем принцип формирования нечетких ситуаций. Нечеткой ситуацией называется нечеткое множество второго уровня [7]:
![]() , (1)
, (1)
где ![]()
Описание нечеткой ситуации приводится в следующем виде:
![]() = {<<
= {<<![]() / ”горизонт”>, <
/ ”горизонт”>, <![]() / ”вниз”>, <
/ ”вниз”>, <![]() / ”сильно вниз”>/”Наклон трубопровода”>, <<
/ ”сильно вниз”>/”Наклон трубопровода”>, <<![]() / ”малый”>, <
/ ”малый”>, <![]() / ”средний”>, <
/ ”средний”>, <![]() / ”большой”>/”Диаметр трубопровода”>, <<
/ ”большой”>/”Диаметр трубопровода”>, <<![]() / ”влево”>, <
/ ”влево”>, <![]() / ”вправо”>, <
/ ”вправо”>, <![]() / ”прямо”>, <
/ ”прямо”>, <![]() / ”вверх”>, <
/ ”вверх”>, <![]() / ”вниз”>/”Целеуказание”>, <<
/ ”вниз”>/”Целеуказание”>, <<![]() / ”малый”>, <
/ ”малый”>, <![]() / ”средний”>, <
/ ”средний”>, <![]() / ”очень большой”>/”Радиус поворота”>, <<
/ ”очень большой”>/”Радиус поворота”>, <<![]() / ”малая”>, <
/ ”малая”>, <![]() / ”средняя”>, <
/ ”средняя”>, <![]() / ”большая”>/”Скорость 1–го колесного модуля”>, <<
/ ”большая”>/”Скорость 1–го колесного модуля”>, <<![]() / ”малая”>, <
/ ”малая”>, <![]() / ”средняя”>, <
/ ”средняя”>, <![]() / ”большая”>/”Скорость 2–го колесного модуля”>, <<
/ ”большая”>/”Скорость 2–го колесного модуля”>, <<![]() / ”малая”>, <
/ ”малая”>, <![]() / ”средняя”>, <
/ ”средняя”>, <![]() / ”большая”>/”Скорость 3–го колесного модуля”>, <<
/ ”большая”>/”Скорость 3–го колесного модуля”>, <<![]() / ”малый”>, <
/ ”малый”>, <![]() / ”средний”>, <
/ ”средний”>, <![]() / ”большой”>/”Ориентация”>}.
/ ”большой”>/”Ориентация”>}.
Описание управляющих решений и способа выбора необходимой последовательности управляющих решений
В разрабатываемой методике управления используется нечеткая модель «ситуация – стратегия управления – действие» [7], которая была модифицирована для решения задачи управления диагностическим роботом. Для мобильного диагностического робота предлагаются следующие управляющие решения:
1. Упор в стенку трубопровода – ![]() . Терм-множества:
. Терм-множества:
![]()
В данном выражении, как и в последующих, вводятся следующие условные обозначения: ![]() – увеличить,
– увеличить, ![]() – уменьшить,
– уменьшить, ![]() – не изменять.
– не изменять.
2. Изменение скорости 1-го колесного модуля – ![]() . Терм-множества:
. Терм-множества:
![]()
3. Изменение скорости 2-го колесного модуля – ![]() . Терм-множества:
. Терм-множества:
![]()
4. Изменение скорости 3-го колесного модуля – ![]() . Терм-множества:
. Терм-множества:
![]()
Термы заданы следующим образом: ![]() – немного увеличить,
– немного увеличить, ![]() – увеличить,
– увеличить, ![]() – немного уменьшить,
– немного уменьшить, ![]() – уменьшить,
– уменьшить, ![]() – не изменять,
– не изменять, ![]() – немного увеличить,
– немного увеличить, ![]() – немного уменьшить,
– немного уменьшить, ![]() – не изменять,
– не изменять, ![]() – немного увеличить,
– немного увеличить, ![]() – немного уменьшить,
– немного уменьшить, ![]() – не изменять
– не изменять ![]() – немного увеличить,
– немного увеличить, ![]() – немного уменьшить,
– немного уменьшить, ![]() – не изменять.
– не изменять.
Используя предлагаемые управляющие решения, разработан способ, согласно которому должен производиться выбор необходимой последовательности решений в зависимости от текущего набора значений восьми признаков.
Максимальные совершенные подмножества, выделенные по отношению порождения управляющих решений, выглядят следующим образом:
|
|
(2) |
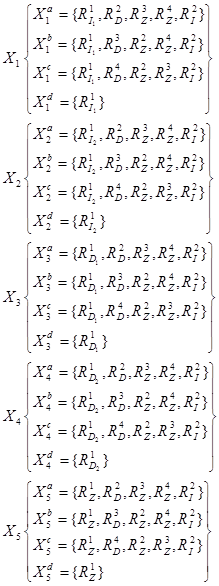
Данные управляющие решения можно сгруппировать на 5 уровней, и поиск необходимого решения будет осуществляться в два этапа: сначала необходимо найти подходящий уровень, а затем внутри уровня выбрать соответствующую входным признакам последовательность управляющих решений.
Предпочтение уровня управляющих решений ![]() рассчитывается с использованием нечетких базовых правил, включающих связь признаков у1 и y2 (термы
рассчитывается с использованием нечетких базовых правил, включающих связь признаков у1 и y2 (термы ![]() и уровней управляющих решений
и уровней управляющих решений ![]() . Нечеткие базовые правила и таблицы соответствия приведены в таблицах 1, 2 и 3.
. Нечеткие базовые правила и таблицы соответствия приведены в таблицах 1, 2 и 3.
Таблица 1
Нечеткие базовые правила признака у1
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Таблица 2
Нечеткие базовые правила признака у2
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Таблица 3
Таблица соответствия для определения уровня управляющих воздействий
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Здесь введены следующие обозначения:
![]() ,
, ![]() – немного увеличить;
– немного увеличить;
![]() ,
, ![]() – увеличить;
– увеличить;
![]() ,
, ![]() – немного уменьшить;
– немного уменьшить;
![]() ,
, ![]() – уменьшить;
– уменьшить;
![]() ,
, ![]() – не изменять.
– не изменять.
После выбора уровня управляющих решений необходимо определить подходящее множество управляющих решений. Поиск осуществляется внутри уровня среди решений, которые условно обозначим как ![]() …
… ![]() (* – номер уровня). Решение выбирается согласно базовым правилам, представленным в таблице 4, которые включают в себя зависимости признаков у3 («Целеуказание») и y8 («Ориентация колесных роботов относительно вертикали»).
(* – номер уровня). Решение выбирается согласно базовым правилам, представленным в таблице 4, которые включают в себя зависимости признаков у3 («Целеуказание») и y8 («Ориентация колесных роботов относительно вертикали»).
Таблица 4
Соответствие признаков у3 и у8
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Значение управляющих воздействий ![]() рассчитывается пропорционально радиусу угла поворота газопровода (признак у4).
рассчитывается пропорционально радиусу угла поворота газопровода (признак у4).
Заключение
Разработанная методика ситуационного управления на нечеткой логике предлагается к применению в системе управления мобильным колесным роботом с трехопорной лучеобразной кинематикой. Укрупненно методика управления изображена на рисунке 1.
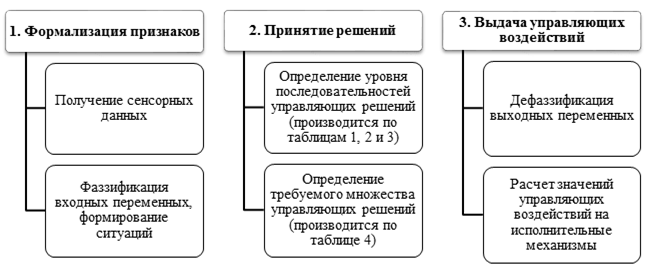
Рисунок 1. Методика ситуационного управления диагностическим роботом
Для настройки системы управления робота, которая будет работать по обозначенной методике, необходимо провести предварительные работы по определению базовых множеств признаков и выходных переменных, зависящих от конкретных физических параметров робота и его технических характеристик (скорости колесных модулей, длина робота, предельные диаметры диагностируемых труб, когда робот находится в максимально сжатом и разжатом положениях). Разработанная методика подходит для решения сложной задачи управления диагностическими роботами разных размеров в условиях изменения параметров газопровода, учитывая все возможные прецеденты.
Рецензенты:
Проталинский О.М., д.т.н., профессор кафедры «Прикладная информатика в экономике», ФГБОУ ВПО «Астраханский государственный технический университет», г. Астрахань.
Попов Г.А., д.т.н., профессор, заведующий кафедрой «Информационная безопасность» ФГБОУ ВПО «Астраханский государственный технический университет», г. Астрахань.