



Введение
Рассматривается применение нейронных сетей для решения задач мониторинга, контроля и диагностики состояния транспортной инфраструктуры. Приводится методика и примеры решения таких задач в нейросетевом базисе.
Транспортная инфраструктура (ТрИ) как исследуемый объект в течение времени мониторинга требует непрерывного изучения ее параметров и характеристик наполняющих ее объектов. Трудоемкость мониторинга зависит от уровня автоматизации процессов получения, обработки, хранения, документирования информации о текущем состоянии ТрИ и ее объектов.
Несмотря на значительный объем исследований в данной области, информационные технологии мониторинга технического состояния объектов ТрИ не являются совершенными по ряду причин, основными из которых являются, с одной стороны, разобщенность баз данных испытаний, отсутствие интеллектуальных компонент, позволяющих качественно и эффективно осуществлять поддержку принятия решений и, как следствие, сокращать общее время, затрачиваемое на обслуживание ТрИ; с другой стороны, нестационарность физических процессов в движении транспортных потоков, сложность математического описания транспортных потоков, зависимость характеристик транспортных потоков от внешних условий и т.д. Указанные факторы приводят к необходимости принятия решений о техническом состоянии объектов ТрИ в условиях существенной неопределенности.
Основным направлением, определяющим повышение качества информационных технологий мониторинга технического состояния ТрИ, является интеллектуализация процессов обработки информации с привлечением методов интеллектуального анализа данных, которые способны обеспечить повышение качества распознавания технического состояния ТрИ при действии указанных выше неопределенных факторов.
Методы интеллектуального анализа данных представляют собой направление, дополняющее и развивающее классические статистические методы исследования [2] – Data Mining – «добыча» данных и обнаружение знаний.
Постановка задачи
Допустим, что состояние ТрИ, как объекта диагностирования, определяется значением вектора выходных параметров Y. Предполагается, что все возможные его состояния можно разбить на (n+1) классов ![]() . Нахождение вектора состояния Х в области
. Нахождение вектора состояния Х в области ![]() определяется как событие, соответствующее исправному состоянию объектов ТрИ. При любом из возможных отказов нормального функционирования объекта ТрИ (внезапных или постепенных) вектор Х принадлежит одной из областей
определяется как событие, соответствующее исправному состоянию объектов ТрИ. При любом из возможных отказов нормального функционирования объекта ТрИ (внезапных или постепенных) вектор Х принадлежит одной из областей ![]() , что рассматривается как событие, связанное с неисправным состоянием
, что рассматривается как событие, связанное с неисправным состоянием ![]() :
:
![]() ;
; ![]() .
.
Тогда задача диагностирования состояния ТрИ заключается в том, чтобы установить соответствие между координатами вектора наблюдений Y и пространства состояний ![]() и на основании наблюдаемых реализаций Y оценить принадлежность вектора состояния Х области
и на основании наблюдаемых реализаций Y оценить принадлежность вектора состояния Х области ![]() или
или ![]() , т.е. определить, к какому из классов относится состояние конкретного объекта ТрИ.
, т.е. определить, к какому из классов относится состояние конкретного объекта ТрИ.
Как показывает анализ, в качестве основы построения систем диагностики ТрИ целесообразно использовать метод FDI (Fault Detection and Identification). Рассмотрим особенности применения данного метода при решении задач диагностики с использованием нейросетевых алгоритмов. Реализация FDI-метода в нейросетевом базисе сводится к следующей последовательности шагов:
- представление эталонных характеристик ТрИ в виде «информационного портрета» с помощью первой нейронной сети;
- сравнение параметров исследуемой ТрИ с данными, рассчитанными первой нейронной сетью;
- на основании анализа вектора «невязок» (отклонений)
 между значениями вектора измеренных параметров Y конкретной ТрИ и вектора эталонных данных
между значениями вектора измеренных параметров Y конкретной ТрИ и вектора эталонных данных  , рассчитанных с помощью первой нейронной сети, принимается решение о техническом состоянии ТрИ (на этом этапе используется вторая нейронная сеть).
, рассчитанных с помощью первой нейронной сети, принимается решение о техническом состоянии ТрИ (на этом этапе используется вторая нейронная сеть).
Вторая нейронная сеть представляет собой бинарный классификатор, на входы которого поступают значения указанных выше отклонений (невязок) ![]() , а выходы образуют бинарный вектор
, а выходы образуют бинарный вектор ![]() , компоненты которого отражают результаты диагноза.
, компоненты которого отражают результаты диагноза.
Для решения задачи диагностики ТрИ в нейросетевом базисе используется обучающая выборка, которая формируется в два этапа. На первом этапе решается «прямая» задача, которая связана с созданием банка данных дефектов. С этой целью на математической модели, описывающей индивидуальную ТрИ, имитируются проявления дефектов, связанных с изменением, например, интенсивности, скорости движения и др. На втором этапе вычисляются отклонения (невязки), вызванные тем или иным дефектом ТрИ от его эталонного состояния: ![]() . Согласно данным о невязках
. Согласно данным о невязках ![]() формируется обучающая выборка:
формируется обучающая выборка: ![]() .
.
В качестве диагностических признаков (входов второй нейронной сети) использовалась информация по 8 параметрам транспортного потока [4]:
- интенсивность движения I;
- плотность транспортного потока k;
- скорость движения v:
- мгновенная va;
- максимальная vm;
- крейсерская vk;
- разрешенная vr;
- продолжительность задержки движения D;
- состав транспортного потока.
Для обучения распознаванию дефектов нейронной сетью в составе обучающей выборки выделены четыре обобщенных класса состояний транспортного потока:
![]() – свободный поток, соответствующий вектору
– свободный поток, соответствующий вектору ![]() ;
;
![]() – синхронизированный поток, соответствующий вектору
– синхронизированный поток, соответствующий вектору ![]() ;
;
![]() – широкие перемещающиеся заторы, соответствующие вектору
– широкие перемещающиеся заторы, соответствующие вектору ![]() ;
;
![]() – старт-стопное движение, соответствующее вектору
– старт-стопное движение, соответствующее вектору ![]() .
.
Для проверки качества работы нейросетевого классификатора на вход сети предъявлялись данные, не входящие в состав обучающей выборки.
С целью сравнительной оценки эффективности разработанного нейросетевого метода диагностирования производилось сравнение этого метода с решением задачи на основе метода наименьших квадратов (МНК). Исследования, проведенные с помощью пакета Statistica 6.0, показали, что для обеспечения достаточной точности диагностирования необходимо использовать полиномы не менее 10-й степени. Сравнительный анализ качества работы нейросетевого и МНК классификаторов показывал, что они обеспечивают примерно одинаковые показатели качества диагностирования состояния ТрИ, однако в условиях наличия шумов нейронная сеть дает меньшую ошибку распознавания [6].
Особенностью рассмотренных выше классификаторов является их обучение на обучающем множестве (обучение с учителем). Вместе с тем представляет интерес исследование возможности построения алгоритмов диагностирования состояния ТрИ без учителя, т.е. в режиме самообучения. Реализация таких алгоритмов в нейросетевом базисе возможна на основе самоорганизующихся сетей Кохонена (рис. 1). В рассматриваемом случае сеть Кохонена имеет 8 входов и 4 выхода ![]() (по числу обобщенных классов состояний транспортного потока) [5].
(по числу обобщенных классов состояний транспортного потока) [5].
Целью обучения нейронной сети Кохонена на основе конкуренции нейронов считается такое упорядочение нейронов (подбор значений их весовых коэффициентов), которое минимизирует значение ожидаемого искажения, оцениваемого погрешностью аппроксимации входного вектора ![]() , значениями весовых коэффициентов нейрона – победителя. При L входных векторах
, значениями весовых коэффициентов нейрона – победителя. При L входных векторах ![]() ,
, ![]() и евклидовой метрике эта погрешность может быть выражена как
и евклидовой метрике эта погрешность может быть выражена как
![]() ,
,
где ![]() – весовые коэффициенты нейрона-победителя при предъявлении сети вектора
– весовые коэффициенты нейрона-победителя при предъявлении сети вектора ![]() .
.
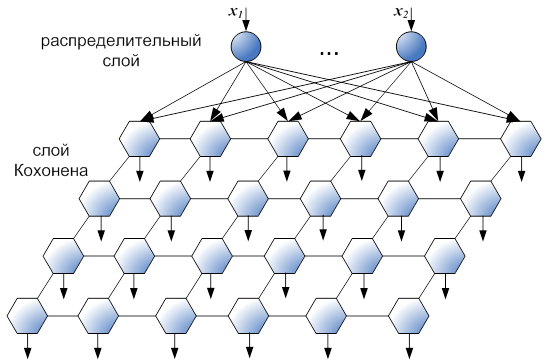
Рисунок 1 – Топология самоорганизующейся сети Кохонена
Сравнительный анализ нейросетевых и классического методов классификации состояния ТрИ показывает, что они практически одинаковы по качеству работы. Но если для персептрона и МНК используется процесс обучения с учителем (заранее известны классы состояний), то при диагностировании ТрИ с помощью самоорганизующейся карты Кохонена разбиение диагностического пространства признаков на классы осуществляется автоматически, количество кластеров в данном случае заранее неизвестно, что, вообще говоря, является преимуществом [1].
Завершающим этапом реализации метода FDI является принятие решения о состояния ТрИ на основе анализа числового вектора F. Определение технического состояния ТрИ осуществляется по правилу «ближайшего соседа», на основании которого ТрИ зачисляется в тот класс, которому принадлежит его ближайший сосед (или большинство из его ближайших соседей) [3]. Решающее правило, на основании которого осуществляется принятие решения (постановка диагноза), записывается как:
![]() , если
, если ![]() ,
,
где ![]() – расстояние до центра ближайшего (р-го) кластера (прецедента), вычисляемое, например, с использованием евклидовой метрики.
– расстояние до центра ближайшего (р-го) кластера (прецедента), вычисляемое, например, с использованием евклидовой метрики.
На основании приведенных выше результатов можно сформулировать следующие выводы.
Нейросетевые технологии можно эффективно применять для решения задач диагностирования состояния ТрИ. Они позволяют работать как с реальными данными, полученными для индивидуальной и эталонной ТрИ, так и с данными, вычисленными с помощью ее математической модели, на основании сравнения которых можно принимать обоснованные решения.
Проведенный сравнительный анализ показал возможность решения поставленных задач диагностирования состояния ТрИ с помощью различных архитектур нейронных сетей (персептрон, самоорганизующаяся сеть Кохонена), обеспечивающих высокую достоверность распознавания состояния.
Преимуществом использования сети Кохонена для решения задачи диагностирования ТрИ является отсутствие указаний эксперта, т.е. возможность автоматической классификации (кластеризации) состояний ТрИ по предъявляемой сети обучающей выборке, состоящей из реальных или вычисленных (эталонных) данных.
Рецензенты:
Титов Б.А., д.т.н., профессор, зав. кафедрой организации и управления перевозками на транспорте, ФГБОУ ВПО «Самарский государственный аэрокосмический университет имени академика С.П. Королева (национальный исследовательский университет)», г. Самара.
Хайтбаев В.А., д.э.н., профессор кафедры организации и управления перевозками на транспорте, ФГБОУ ВПО «Самарский государственный аэрокосмический университет имени академика С.П. Королева (национальный исследовательский университет)», г. Самара.