



По данным о состоянии транспортного парка принимаются решения о замене выбывающих (списываемых) машин, внедрении новых машин и средств малой механизации.
При формировании парка машин необходимо учитывать условия производства, влияющие на производительность машин, а также возможности их взаимозаменяемости. Во всех случаях следует стремиться к выбору машин, которые могут быть в максимальной степени эффективно использованы в производстве [1; 3].
Необходимым и неотъемлемым этапом в повышении эффективности функционирования парка транспортно-технологической техники является разработка методики выбора рациональной структуры подвижного состава парка [5]. При формировании крупных парков машин для оптимизации структуры применяются математические методы. Математическая модель эффективности предприятия базируется на принципах системного анализа.
Совокупность целевых функций, образующих вектор полезного эффекта, можно представить в виде:
![]() , (1)
, (1)
где fi – стоимость транспортной операции i -й группы транспортных средств, i=1….n;
Вектор варьируемых параметров системы – транспортные средства.
![]() ,
(2)
,
(2)
где Ni – количество транспортных средств i -й группы.
Вектор внешних возмущений характеризует работу, выполняемую ТС
![]() , (3)
, (3)
где ∆L – изменение вида работ i -й группы транспортных средств.
Вектор фиксированных внутренних параметров составляют затраты на содержание ТС:
![]() , (4)
, (4)
где ai – затраты на содержание i -й группы транспортной техники.
Показателем, характеризующим эффективность функционирования парка ТС, является коэффициент эффективности работы парка, который можно представить в виде:
 , (5)
, (5)
где Vj – объем j-го вида специализированных работ, выполняемых парком;
pj – стоимость j-го вида специализированных работ, выполняемых парком;
Сi – затраты на эксплуатацию i -й группы ТС.
Согласно [2] и с учетом особенностей эксплуатации ТС затраты на эксплуатацию группы подвижного состава определяются как:
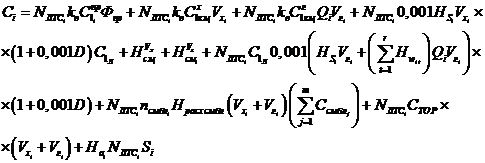 (6)
(6)
где ![]() – количество ТС i -й группы; k – коэффициент отношения водителей на одно
ТС;
– количество ТС i -й группы; k – коэффициент отношения водителей на одно
ТС; ![]() – часовая тарифная ставка рабочего при
простое i
-го ТС; Фпр – годовой
фонд времени простоя ТС;
– часовая тарифная ставка рабочего при
простое i
-го ТС; Фпр – годовой
фонд времени простоя ТС; ![]() – стоимость одного километра при
холостом пробеге i
-го ТС;
– стоимость одного километра при
холостом пробеге i
-го ТС; ![]() - холостой пробег i -го ТС; Q – грузоподъёмность i-й машины;
- холостой пробег i -го ТС; Q – грузоподъёмность i-й машины; ![]() –
выполненный объем работы i
- го ТС;
–
выполненный объем работы i
- го ТС; ![]() – тарифная ставка рабочего при работе i-го вида транспорта;
– тарифная ставка рабочего при работе i-го вида транспорта; ![]() – стоимость литра топлива;
– стоимость литра топлива; ![]() – стоимость i -го сменного блока;
– стоимость i -го сменного блока; ![]() – стоимость i -го ТC;
– стоимость i -го ТC; ![]() – базовая норма расхода топлива i-го ТС; –
надбавка к расходу топлива, учитывающая условия эксплуатации;
– базовая норма расхода топлива i-го ТС; –
надбавка к расходу топлива, учитывающая условия эксплуатации; ![]() – расход
топлива i-го
ТС при выполнении i
-го вида работ; Hcмi – норма расхода смазочных материалов i -го ТС;
– расход
топлива i-го
ТС при выполнении i
-го вида работ; Hcмi – норма расхода смазочных материалов i -го ТС; ![]() – количество сменных блоков (шин, пил,
тросов и др.) i -го ТС;
– количество сменных блоков (шин, пил,
тросов и др.) i -го ТС; ![]() – норма расхода сменных блоков i -го ТС;
– норма расхода сменных блоков i -го ТС; ![]() –
норма амортизации i -го ТС.
–
норма амортизации i -го ТС.
Анализируя выражение (6), получаем, что каждое из слагаемых содержит множитель NЛТСi – количество единиц техники в i -й группе. С учетом этого выражение (7) можно представить как:
![]() ;
; ![]() ,
(7)
,
(7)
где Ci – затраты на эксплуатацию единицы
техники в i-й
группе.![]()
При
формировании математической модели принимается ![]() .
.
С учётом выражений (5-7) целевая функция оптимизации состава парка ТC примет следующий вид:
![]() .
(8)
.
(8)
Предлагается для оптимизации структуры парка ТС использовать алгоритм ЛПt - поиска.
Рассмотрим
n-мерное пространство, состоящее из точек А с декартовыми координатами (![]() ). Таким образом, каждой точке А пространства параметров соответствует конкретный набор
параметров (
). Таким образом, каждой точке А пространства параметров соответствует конкретный набор
параметров (![]() ), соответствующий конкретному составу парка ТС. В
качестве ограничения примем затраты на эксплуатацию парка транспортной техники,
которые желательно сократить:
), соответствующий конкретному составу парка ТС. В
качестве ограничения примем затраты на эксплуатацию парка транспортной техники,
которые желательно сократить:
![]() . (9)
. (9)
Обозначим через G
подмножество
параллелепипеда П, состоящее из
точек А, удовлетворяющих ограничению (9). Множество G
может
быть любым замкнутым множеством. Единственное ограничение: объем G
должен
быть положительным (Vc > 0). Пусть
D – множество точек А, которые
удовлетворяют заданному ограничению (9),
так что ![]() ; если множество D не
пусто, то оно замкнуто.
; если множество D не
пусто, то оно замкнуто.
В основе предлагаемого алгоритма лежит численное исследование пространства параметров проектируемой системы. Блок-схема алгоритма метода исследования пространства параметров изображена на рис. 1.
Исследование проводится в четыре этапа.
Предварительный этап – выбор пробных точек. Во всех расчетах мы использовали точки ЛПt - последовательности. По декартовым координатам очередной точки вычисляются декартовы координаты точки, принадлежащей параллелепипеду П:
![]() (10)
(10)
При ![]() рассчитываем
значения параметра Собщ.
Проверяем выполнение функциональных ограничений. Если они выполнены, то точка отбирается в качестве
пробной точки в G и
вычисляются все; в
противном случае точка
рассчитываем
значения параметра Собщ.
Проверяем выполнение функциональных ограничений. Если они выполнены, то точка отбирается в качестве
пробной точки в G и
вычисляются все; в
противном случае точка ![]() отбрасывается.
отбрасывается.
1-й этап: составление таблиц испытаний. Этот этап выполняется ЭВМ без вмешательства человека. Последовательно выбираются пробные точки, равномерно расположенные в G. В каждой из точек вычисляются значения F и Собщ и составляется таблица испытаний (табл. 1), в которой значения F расположены в порядке убывания.
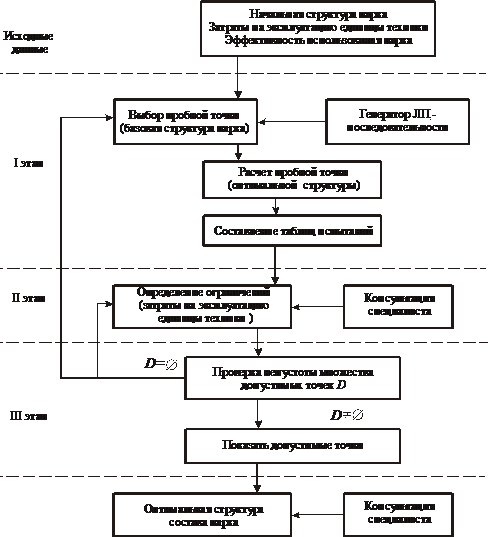
Рис. 1. Блок-схема алгоритма формирования оптимальной структуры парка машин
2-й этап: задание ограничения для Собщ. Этот этап предполагает вмешательство эксперта, который должен назначить ограничение для каждого вида ТС.
3-й этап: проверка непустоты D. Этот этап также выполняется автоматически, без вмешательства человека. Если множество D не пусто, то задача (10) имеет решение.
В противном случае следует вернуться ко второму этапу и ослабить ограничения. Если ослабление ограничений невозможно, то необходимо вернуться к первому этапу и увеличить количество N пробных точек, чтобы повторить второй и третий этапы с таблицами испытаний большего объема.
На третьем этапе мы находим не одну, а ![]() точек, принадлежащих D. Очевидно,
точек, принадлежащих D. Очевидно,
![]() . Множество этих точек обозначаем через DN. Для того чтобы получить
наиболее оптимальную структуру парка машин, удовлетворяющую условиям (8) и (9),
необходимо выбрать
. Множество этих точек обозначаем через DN. Для того чтобы получить
наиболее оптимальную структуру парка машин, удовлетворяющую условиям (8) и (9),
необходимо выбрать ![]() ,
при котором значение F будет минимальным. На
данном этапе также целесообразно привлечение эксперта.
,
при котором значение F будет минимальным. На
данном этапе также целесообразно привлечение эксперта.
Постановка задачи: определить оптимальную структуру парка транспортных средств, при которой эффективность их эксплуатации будет максимальной. В качестве показателя эффективности принимаем коэффициент эффективности работы парка. Данная задача является многокритериальной. Определим исходные данные и ограничения для ее решения.
Исходные данные. Варьируемые параметры – количество единиц транспортной техники в парке: α1 универсальная машина для валки – ЛЗ-3; α2 - пильные аппараты для агрегатных машин – ЦДТ-7ш; α3 - агрегат сучкорезно-раскряжевочный СМ –34; α4 - погрузочно-разгрузочные устройства МГУ-70М; α5 - навесное оборудование для лесозаготовительных работ ОН-1; α6 - чокер для трелевки леса ЧТ-1; α7 - мини-трактор – КМЗ-012; α8 - мотоблок – Мб-2; α9 - мотокультиватор – крот; мототележка – С-3.901; α10 - трактор лесохозяйственный – ХТА-200-02; α11 - трактор трелевочный – ТТ-4М; α12 - тягач-роспуск – КрАЗ-6443; α13 - форвардер – КС-421; α14 - экскаватор – ЭО 70-2621.
Ограничения: Собщ - затраты на
эксплуатацию парка транспортной техники (млн руб/год):
![]() (значение ограничения установлено
экспертом) Критерии
качества - эффективность
работы парка ТС. Данный показатель должен быть максимальным.
(значение ограничения установлено
экспертом) Критерии
качества - эффективность
работы парка ТС. Данный показатель должен быть максимальным.
Для решения поставленной задачи программа задает небольшие
пределы варьирования параметров, приведенные выше. Они определяют пятнадцатимерный
параллелепипед П, в центре
которого расположена точка ![]() . В качестве пробной точки была выбрана
структура парка машин ООО «Ковровский
лесокомбинат», его структура определялась экспертным путем.
. В качестве пробной точки была выбрана
структура парка машин ООО «Ковровский
лесокомбинат», его структура определялась экспертным путем.
Подсистема генерирует множество точек и отбирает из них те,
которые удовлетворяют наложенному ограничению. Оптимальной признается та структура
парка, которой соответствует максимальное значение параметра эффекта. В
параллелепипеде П при заданных
ограничениях было проведено ![]() испытаний.
Количество точек, удовлетворяющих заданному ограничению
испытаний.
Количество точек, удовлетворяющих заданному ограничению![]() (эффективность отбора
(эффективность отбора ![]() ). Результаты расчета представлены на
рис. 2.
). Результаты расчета представлены на
рис. 2.
Среди
отобранных 150 точек, попавших в таблицу испытаний, необходимо выделить
наиболее эффективные. С учетом указанных критериев самой эффективной оказалась
точка ![]() , так как для данной структуры
парка коэффициент эффективности максимальный.
, так как для данной структуры
парка коэффициент эффективности максимальный.
Вывод. Таким образом, предложенный подход позволяет определить оптимальную структуру состава парка транспортно-технологических машин, исходя из типов и объемов выполняемых работ, а также затрат на эксплуатацию каждого типа ТС.

Рис. 2. Оптимизация структуры состава парка транспортных машин
Рецензенты:
Бурмистрова О.Н., д.т.н., зав. кафедрой технологии и машин лесозаготовок ФГБОУ ВПО «Ухтинский государственный технический университет», г. Ухта;
Павлов А.И., д.т.н., профессор кафедры инжиниринга технологических машин и оборудования ФГБОУ ВПО «Ухтинский государственный технический университет», г. Ухта.
Библиографическая ссылка
Пильник Ю.Н., Сушков С.И., Арутюнян А.Ю. МЕТОДИКА ОПРЕДЕЛЕНИЯ ОПТИМАЛЬНОЙ СТРУКТУРЫ ПАРКА ТРАНСПОРТНО-ТЕХНОЛОГИЧЕСКИХ МАШИН // Современные проблемы науки и образования. 2015. № 2-2. ;URL: https://science-education.ru/ru/article/view?id=22674 (дата обращения: 16.04.2025).